


據(jù)中國(guó)航天科技集團(tuán)公司相關(guān)專家介紹,“神八”與天宮一號(hào)的對(duì)接過(guò)程,就如同太空中兩列沒(méi)有鐵軌的高速運(yùn)轉(zhuǎn)的列車實(shí)現(xiàn)首尾相接,對(duì)接后,天宮一號(hào)要在兩個(gè)飛行器之間建立能供航天員通過(guò)的氣密通道,此外,還要實(shí)現(xiàn)與神舟八號(hào)電、氣、液的共通,收到“對(duì)得上,分得開(kāi)”的效果。這給對(duì)接控制和對(duì)接機(jī)構(gòu)提出了較高要求。

對(duì)接機(jī)構(gòu)是目前最復(fù)雜的空間機(jī)構(gòu),有軸承齒輪各300個(gè)左右,零部件上萬(wàn)個(gè)。專家舉例說(shuō),比如首次使用的我國(guó)自主研制的電連接器,作用就十分關(guān)鍵——4只直徑在3.8厘米的電連接器的插頭,必須在準(zhǔn)確的時(shí)間內(nèi)完成與“神八”對(duì)接口上四只插座的對(duì)接,難度就好像人們用針尖去碰觸針尖。
另外,“神八”在外面配備有無(wú)線電測(cè)量敏感器,在交會(huì)對(duì)接時(shí)發(fā)揮作用。
記者昨日從位于煙臺(tái)的中國(guó)航天科技集團(tuán)公司第五研究院513所了解到,“神八”上有30臺(tái)套設(shè)備由513所研制。
據(jù)了解,513所承擔(dān)了“神八”上22臺(tái)電子產(chǎn)品和8套結(jié)構(gòu)機(jī)構(gòu)產(chǎn)品的研制任務(wù),電子產(chǎn)品涉及熱控、環(huán)控、儀表、數(shù)管、結(jié)構(gòu)機(jī)構(gòu)等分系統(tǒng)。尤其值得一提的是,儀表控制器是儀表照明分系統(tǒng)的核心計(jì)算機(jī),是儀表照明分系統(tǒng)中進(jìn)行數(shù)據(jù)通信、圖形顯示和人機(jī)交互的關(guān)鍵設(shè)備,也是未來(lái)航天員在軌進(jìn)行空間實(shí)驗(yàn)和空間站管理的“重要工具”。這些重要設(shè)備的研制成功,為“神八”的正常運(yùn)行提供了重要保證。
“神八”的推進(jìn)分系統(tǒng)由返回艙推進(jìn)子系統(tǒng)和推進(jìn)艙推進(jìn)子系統(tǒng)組成。飛船空間停靠時(shí)間為180天,在軌工作時(shí)間為5天。返回艙子系統(tǒng)位于返回艙凹艙內(nèi),采用單元恒壓擠壓式推進(jìn)方式。系統(tǒng)共配置8臺(tái)單元發(fā)動(dòng)機(jī),提供返回艙俯仰、偏航和滾動(dòng)所需的動(dòng)力。推進(jìn)艙采用雙元統(tǒng)一恒壓擠壓式推進(jìn)系統(tǒng)。系統(tǒng)共配置40臺(tái)大小不一的姿軌控發(fā)動(dòng)機(jī)。
由于飛船結(jié)構(gòu)改進(jìn),推進(jìn)艙增加了熱控、環(huán)控、溫控裝置,受制于運(yùn)載發(fā)射質(zhì)量的限制,推進(jìn)艙的質(zhì)量要求不得增加,還必須適當(dāng)降低。于是,增加結(jié)構(gòu)支架和降低質(zhì)量?jī)烧咧g形成了矛盾,成為一個(gè)非常棘手的難題。
為此研制人員決定使用鋁鋰合金這一新型航天材料,它具有較低的密度、較高的比強(qiáng)度和比剛度,用它替代目前我國(guó)航天普遍采用的常規(guī)鋁合金材料,能使產(chǎn)品減重15%—20%。
經(jīng)過(guò)艱苦攻關(guān),航天科技集團(tuán)的研制人員終于解決了鋁鋰合金在熱處理性能和鉚接性能方面的難題,摸索到了一套比較完整的鋁鋰合金艙體結(jié)構(gòu)制造工藝技術(shù),掌握了鋁鋰合金薄板、型材鈑金成型、熱表處理、機(jī)械加工、鉚接裝配等工藝技術(shù)。目前鋁鋰合金除了“神八”,也用在天宮一號(hào)上。
據(jù)上海航天技術(shù)研究院研究員陶建中介紹,當(dāng)“神舟八號(hào)”和“天宮一號(hào)”在同一時(shí)刻以同樣的速度到達(dá)同一個(gè)地點(diǎn)順利交會(huì),兩個(gè)飛行器的速度、位置、姿態(tài)、偏差等11個(gè)參數(shù)滿足對(duì)接的初始條件后,飛行器就將停止控制,讓它們根據(jù)慣性進(jìn)行碰撞,整個(gè)對(duì)接過(guò)程大約需要10分鐘,分8個(gè)步驟完成。
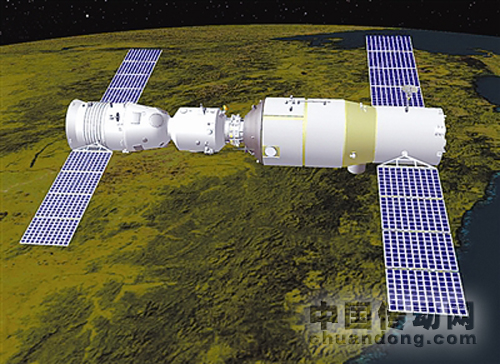
第一步是“相撞”。在慣性作用下,8噸重的“神舟八號(hào)”與8.6噸重的“天宮一號(hào)”以每秒0.2米左右的速度進(jìn)行相撞,當(dāng)“神舟八號(hào)”上的主動(dòng)對(duì)接機(jī)構(gòu)碰撞上“天宮一號(hào)”上的被動(dòng)對(duì)接機(jī)構(gòu),對(duì)接過(guò)程正式開(kāi)始。
第二步是“捕獲”。當(dāng)“神舟八號(hào)”主動(dòng)對(duì)接機(jī)構(gòu)上的對(duì)接環(huán),接到失衡傳感器發(fā)出對(duì)接指令信號(hào)后,6根滾珠絲桿就會(huì)向外推出200多毫米,對(duì)接環(huán)上安裝的3對(duì)捕獲鎖,撞到“天宮一號(hào)”被動(dòng)對(duì)接機(jī)構(gòu)相對(duì)應(yīng)的卡板器,就會(huì)被牢牢卡住。
第三步是“緩沖”。“神舟八號(hào)”對(duì)接環(huán)受到撞擊后,將會(huì)通過(guò)一套傳動(dòng)機(jī)構(gòu),聯(lián)向?qū)訖C(jī)構(gòu)上的摩擦自動(dòng)器和電磁阻尼器,分別吸收縱向和橫向的撞擊能量,進(jìn)行緩沖。
第四步是“校正”。當(dāng)“神舟八號(hào)”成功捕獲“天宮一號(hào)”并實(shí)施緩沖后,“神舟八號(hào)”對(duì)接環(huán)的6根滾珠絲桿繼續(xù)往外推至300毫米,同時(shí)對(duì)兩個(gè)航天器的姿態(tài)、位置和偏差等進(jìn)行強(qiáng)行校準(zhǔn)。
第五步是“拉近”。校準(zhǔn)后,“神舟八號(hào)”對(duì)接環(huán)的6根滾珠絲桿緩緩收縮,將兩個(gè)飛行器“拉近”。
第六步是“拉緊”。“神舟八號(hào)”和“天宮一號(hào)”的對(duì)接面上,分別安裝了6組共12把對(duì)接鎖,每把對(duì)接鎖的拉力達(dá)3噸。當(dāng)兩個(gè)飛行器被拉近后,兩個(gè)對(duì)接面的12把對(duì)接鎖一一相扣。
第七步是“密封”。兩個(gè)飛行器拉緊后,對(duì)接機(jī)構(gòu)上的驅(qū)動(dòng)電機(jī)將帶動(dòng)鋼絲繩系統(tǒng),將兩個(gè)連接器面上的密封圈壓縮,保持密封。
第八步是“剛性連接”。通過(guò)對(duì)接鎖使兩個(gè)連接器貼合,實(shí)現(xiàn)“剛性連接”,將兩個(gè)航天器組合成一體。
此文為中國(guó)傳動(dòng)網(wǎng)獨(dú)家整理稿件,如需轉(zhuǎn)載請(qǐng)注明出處。






























 網(wǎng)站客服
網(wǎng)站客服 粵公網(wǎng)安備 44030402000946號(hào)
粵公網(wǎng)安備 44030402000946號(hào)