


【哈佛超柔性機器人把水母握手心 ,還可下海活捉章魚】
導讀:近期哈佛大學的研究人員研發了一款十二面體的“折紙花瓣”柔性機械臂RAD,能夠抵達人類無法到達的深海,捕捉海底世界的軟體動物并將其完好無損地帶回陸地,對深海探索有極大應用潛力。

近期哈佛大學的研究人員研發了一款十二面體的“折紙花瓣”柔性機械臂RAD,能夠抵達人類無法到達的深海,捕捉海底世界的軟體動物并將其完好無損地帶回陸地,對深海探索有極大應用潛力。相關論文發表在ScienceRobotics發表。
絢爛多彩的海底世界,一直是科學家們積極探索的另一個神秘空間。那里有色彩斑斕的珊瑚,有純凈優雅的水母,有各種各樣比人類存活要長很多很多的遠古生物。
據科學家介紹,海底世界是地球上資源最廣又開采最少的自然環境,而且至少還有100萬種尚未挖掘的物種。而且許多未被發現的水生動物是凝膠狀的,因此超級脆弱。傳統的捕獲技術,如網,通常會破壞這些生物。
該如何探索這神秘的海底世界呢?

柔軟的機器人抓手,把海底生物握在掌心
海底危機四伏的環境并不適宜人類親自抵達,而所借助的機器人大多又粗糙堅硬,沒辦法將古老的軟體動物完好無損的帶回陸地。
因此,開發一種柔軟的機器人抓手,成為解決這一問題的出路。近期哈佛大學的研究人員就研發了這樣一款柔軟抓手,并把詳細文章發表在了《ScienceRobotics》上。

這是一款以折紙為靈感的機器人抓手,全名為RotaryActuatedDodecahedron縮寫為RAD,它看上去像一個5瓣的花朵,當機器人抓手的5個花瓣關合時,從外形上看是一個中空的十二面體,能夠在觀察到獵物時迅速關合并且給獵物留下足夠的空間。

機器人的5個花瓣完全相同,是通過3D打印的聚合物,這種材料質地柔軟耐用。花瓣們被連接到一系列的旋轉接頭上,這些旋轉這頭連載一起形成支架。
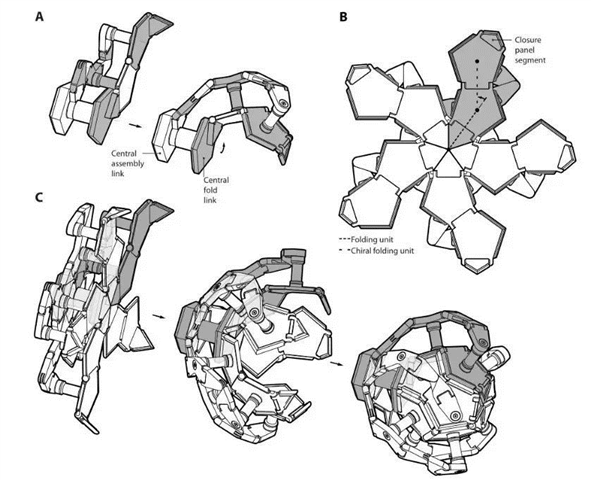
這個抓手最神奇的地方,是受到折紙的啟發,機器人的5個花瓣附著在一系列的旋轉接頭上,僅需要一個電機就能讓整個結構圍繞其關節旋轉,將抓手折疊成中孔的12面體。而且研究人員嘗試了集中不同的形狀,但這種12面版的效果最好。
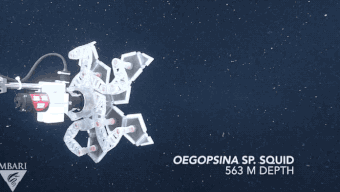
目前這款機器人抓手已經在水族館內進行了測試,它能夠成功捕獲并釋放柔軟的水母,而不對它造成任何傷害。

而且,這款機器人抓手還被安裝在了一款水下機器人機體上,并成功潛入700米海底警醒了深度測試。在遠程測試中它也成功捕獲并釋放了魷魚、章魚和水母等標本。
不僅適合深海,也適合太空中使用
這款機械手的研發兼文章的第一作者表示,RAD采樣器設計非常適合深海環境,因為它的控制非常簡單,因此可以使元素更少。它也是模塊化的,所以如果有什么東西壞了,我們可以簡單地更換部件并將采樣器送回水中,而且這種折疊設計也非常適合在太空中使用。






























 網站客服
網站客服 粵公網安備 44030402000946號
粵公網安備 44030402000946號