


摘要:在現代裝備制造業繁榮發展的過程中,裝備的功能和性能都取決于數控加工這一關鍵技術.在開放式數控系統上,以PMAC為基礎,進行數控系統的開發,分別對數控系統內的硬件模塊和軟件結構的優化與開發進行了探討,構建了比較完善的開放式數控系統.
在當前的市場上,數控系統中的硬件模塊和軟件結構基本都是專用的,兼容性非常差,在科學技術不斷進步的過程中,缺點逐漸暴露出來.基于此,以PMAC為基礎,對數控系統內的硬件模塊和軟件結構進行優化與開發,進而構建出比較完善的開放式數控系統.
1、基于PMAC的數控系統總體概述
在進行開放式數控系統構建時,系統的實現途徑是首先需要考慮的問題,對于開放式數控系統的實現,要充分的考慮該系統的發展特點、開發的成本、開發的難度等因素,最終選擇出恰當的實現方式,基于這些方面的因素,本文中采用的形式為IPC+可編程運動控制器.所謂IPC+可編程運動控制器形式,是指在IPC的基礎上,將可編程運動控制器嵌入進去[1].實際上,此種系統的運行平臺為IPC,而核心性的部件為可編程運動控制器,這種形式的開放式數控系統所具備的擴展性是非常好的,當用戶需要進行
再次開發時,該形式完全支持.此系統的開放性有兩級,一個是上級,另一個是下級.除了具備成本低的優點之外,對于用戶自定義的軟件,在系統中能夠比較好的運行,與傳統的CNC相比,該系統界面所具備的友好性更優.
2、硬件模塊開發
2.1總體結構
基于PMAC的數控系統在進行開發時,PMAC型號的選擇是非常重要的一個環節.在本文研究開發的系統中,選擇的運動控制卡為PMACC2A-PC104型,這個型號的運動控制卡屬于板卡級產品,比較適合應用于嵌入式系統中.控制卡具備十分緊湊的結構,在使用的過程中成本比較少,具備比較高的經濟性[2].
根據上面的闡述可知,本文中開發的基于PMAC的數控系統實現形式為IPC+可編程運動控制器,此可編程運動控制器選擇的就是PMAC運動控制卡.由此,開放式數控系統的實現形式為IPC+PMAC,在開發的數控系統中,選擇的IPC為上位機,主要的職責就是完成非實時性的任務,比如系統管理等,對于系統內的資源,合理的進行分配,在傳遞信息時,速度非常快.運動控制卡的主要任務是進行控制,控制的對象為運動軸,具備極強的實時性,同時,還擔負采集的職責,各軸的測量信息都在采集的范圍之內.I/O卡的主要功能是輸入和輸出,當各種開關量信號需要進行輸入或輸出時,I/O卡就開始工作,其所完成的也是實時性的任務.
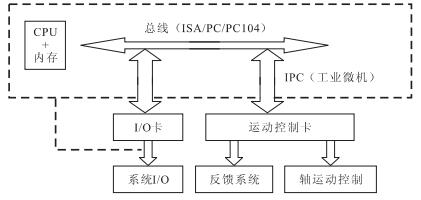
圖1IPC+PMAC總體結構圖
2.2工控機
工控機是指工業控制計算機,在工業環境中,其運行具備較高的可靠性,與傳感器等裝備能夠實現直接連接,從而有效地完成測控任務.無論是生產現場還是機械設備的組成部分,工控機都可以實現有效的應用,在生產現場,對整個生產過程進行實時的監控,并完成數據采集、處理和控制任務,而當工控機作為機械設備的組成部分時,主要的就是完成控制任務[3].工控機的性能非常的穩定,在運算時,具備很快的速度.除此之外,工控機還具備兩大優點,一個是可靠性高,另一個是具備較高的環境適應能力.基于PMAC的數控系統在開發的過程中,模擬的是工業環境,因此系統中選擇的工控機型號為PLK-450,此種型號的工控機在嵌入PMAC卡時,便捷性非常好.另外,工控機所配備的接口為USB型,即使PMAC卡與工控機之間的安裝形式分裝,通信也能夠有效的保證.
2.3主基板
在開放式數控系統中,需要對5個軸進行控制,而PMACC2A-PC104在進行控制時,可以同時對4個軸進行控制,這就需要對運動控制卡進行擴展.在數控系統中,主卡為此型號的運動控制卡,隨后添加一個副卡,副卡選擇的是ACC-1P軸擴展板,此擴展板同樣具備4個通道.由此一來,數控系統中所具備的軸數就增加為8個.
2.4I/O板
對于運動控制系統來說,除了要執行運動程序之外,還需要執行邏輯控制程序.通常來說,原點、限位、主軸功能等都是數控系統中需要處理的邏輯變量,在對這些邏輯變量進行處理時,多是由可編程邏輯控制器來進行.在開發的開放式數控系統中,原點和限位的處理可以由主卡來進行,而其他的邏輯處理則需要利用I/O板來實現,并且要對其進行擴展,擴展的實現也是由擴展板來實現,型號為ACC-2P.
3、軟件結構開發
3.1軟件開發核心技術
在開放式數控系統中,軟件是十分重要的組成部分,對數控系統的功能有著重要的影響.在進行控制系統軟件開發時,要注意以下四個方面的技術問題:第一,合理的選擇軟件開發平臺.軟件開發需要通過相應的開發平臺來實現,在進行控制系統的軟件開發平臺搭建時,平臺除了要具備軟件開發的功能之外,還需要蘊含十分豐富的開發資源,以便于二次開發或后續使用的實現.在進行基于PMAC的開放式數控系統軟件開發時,以Windows2000為操作平臺來實現軟件開發,同時,開發資源來源于PMAC的動態鏈接庫[5];第二,插補算法的確定.當前,在控制機床軌跡時,采用的插補策略為粗插補和精插補結合的方式,然而在進行插補的過程中,受到采樣頻率的制約,在一些中低速場合中,此種方法具備很好的插補效果,但是如果是高速高精度場合,此種插補策略無法滿足要求.基于此,在進行軟件開發時,選擇的插補算法為高速高精度,這在PMAC具備的功能中可以很好的實現;第三,注重軟件伺服控制的性能.數控系統的主要目的是對數控技術進行控制,在實現控制目標的過程中,最終的部分就是伺服控制,通過伺服控制的功能,使得數控加工過程中,精度和速度都能夠滿足加工的要求.因此,在進行軟件開發時,就必須要十分注重軟件伺服控制的性能,在PMAC運動控制卡中,所提供的算法為數字PID伺服控制,由此一來,伺服控制所具備的性能就非常的優良;第四,保證軟件開發的可靠性及效率.數控系統中的軟件所承擔的任務是比較多的,在軟件設計的過程中,必須要保證軟件具備完成這些任務的功能,由此導致軟件設計與開發的復雜性比較高,為了保證軟件開發具備較高的可靠性,同時在保證性能的基礎上盡量地縮短開發周期,就需要采用恰當的開發語言.在PMAC的動態鏈接庫中,能夠實現高級語言開發的支持.因此,在進行軟件設計時,采用的設計方法為模塊化程序設計,進而不但滿足了可靠性及高效率的要求,而且在軟件使用的過程中,維護非常的簡單[6].
3.2數控系統軟件開發
具體說來,開放式數控系統在進行軟件開發時,主要包含兩個部分,一部分是PMAC實時控制軟件,另一個部分是系統管理軟件.對于PMAC實時控制軟件,在進行設計時,開放性是必須要充分考慮的因素,不同的用戶具備不同的功能需求,開發出來的PMAC實時控制軟件要支持用戶增加軟件功能模塊;而對于系統管理軟件來說,所承擔的功能并不具備實時性,比如系統初始化、故障診斷、系統進程管理等.軟件開發的進行需要以系統設計要求為依據.首先,分析系統的需求功能;其次,根據系統功能,對軟件所承擔的功能進行有效地劃分;最后,以Windows2000操作平臺以及開發資源為基礎,完成軟件開發[7].
開放式數控系統的控制軟件具備開放性的特征,主要包含五個層次,這五個層次的不同功能形成了控制軟件的體系結構,見圖2.開放式數控系統軟件開發最關鍵的一個環節是在操作系統的選擇上,因為它是一個實時的多任務控制系統,也只有這樣,才能確保數控系統控制的實時性.
控制軟件的開發在Windows2000平臺上進行,采用的開發語言為VB語言,在數控系統中,大部分的任務都是實時性任務.因此,PMAC與IPC之間通信的建立、故障診斷、參數輸入等都是軟件開發過程中的重點.在PMAC運動控制器中,包含軟件包Pcomm32,此軟件包具備較強的開放性,同時,其中還包含ActiveX通信空間,當IPC與PMAC通信時,只需通過這兩項功能就可以有效地實現通信.由此一來,通信設計中比較繁瑣的驅動程序設計就可以直接省略,提升了軟件開發的效率.除了開放性之外,利用VB語言開發出來的軟件具備的可移植性也非常好.通過Windows2000與VB語言的有效結合,再加上編程時采用面向對象法,保證了軟件開發的可靠性.同時,PMAC的動態鏈接庫中具備豐富的開發資源,促使軟件開發的順利實現,也保證了軟件基本功能的實現.
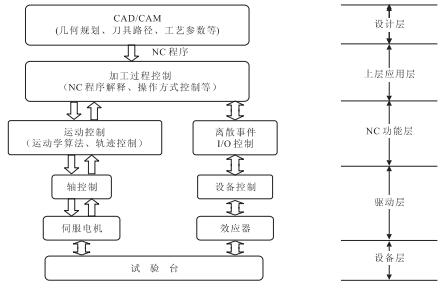
圖2控制軟件的體系結構
4、結論
數控技術的開發與應用促進了現代裝備制造業的繁榮發展,在應用數控技術的過程中,需要通過數控系統來對其進行控制,以便于保證數控加工的速度及精度.原有的數控系統所具備的開放性不足,為了改善這個問題,在PMAC的基礎上,開發了開放式的數控系統.在明確系統的總體框架之后,通過相應的硬件模塊開發與軟件結構開發,不僅保證了數控系統的開放性,同時提升了數控系統的性能,有效地實現了控制,最終推進了現代裝備制造業長久的發展.
更多資訊請關注運動控制頻道






























 網站客服
網站客服 粵公網安備 44030402000946號
粵公網安備 44030402000946號