時間:2024-01-31 15:55:10來源:世界先進制造技術(shù)論壇
工業(yè)機器人在惡劣條件下運行,即使設(shè)計時進行完善的設(shè)計規(guī)范,維護率可以降低,但是,仍必須定期進行常規(guī)檢查和預防性維護。
1 系統(tǒng)控制柜
維護頻率如下:
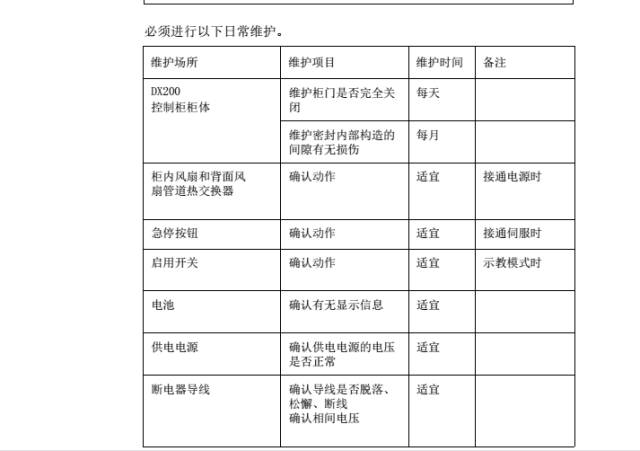
① 一般維護,1次/天;
② 清洗/更換濾布,1次/500H;
③ 測量系統(tǒng)電池的更換,2次/7000H;
④ 計算機風扇單元的更換、伺服風扇單元的更換,1次/50000H;
⑤ 檢查冷卻器,1次/M
1、時間間隔主要取決于環(huán)境條件;
2、視機器人運行時數(shù)和溫度而定;
3、適當確定機器人的運行順暢與否。
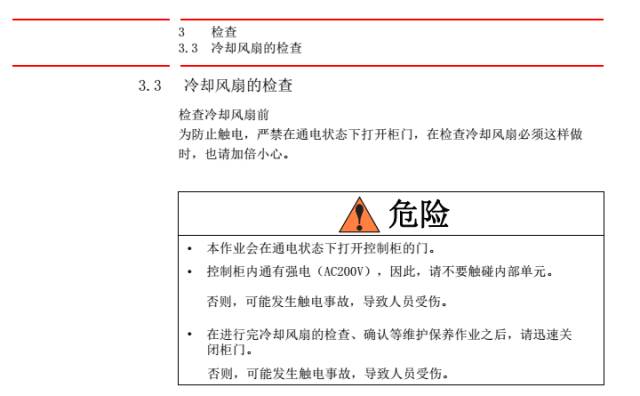
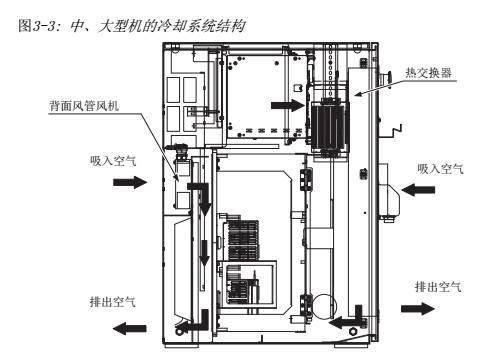
(一)檢查控制器散熱
確保以下影響散熱的因素無一出現(xiàn):
控制器覆蓋了塑料或其它材料;
控制器后面和側(cè)面沒有留出足夠間隔(>120mm);
控制器的位置靠近熱源;
控制器頂部放有雜物;
控制器過臟;
一臺或多臺冷卻風扇不工作;
風扇進口或出口堵塞;
空氣濾布過臟。
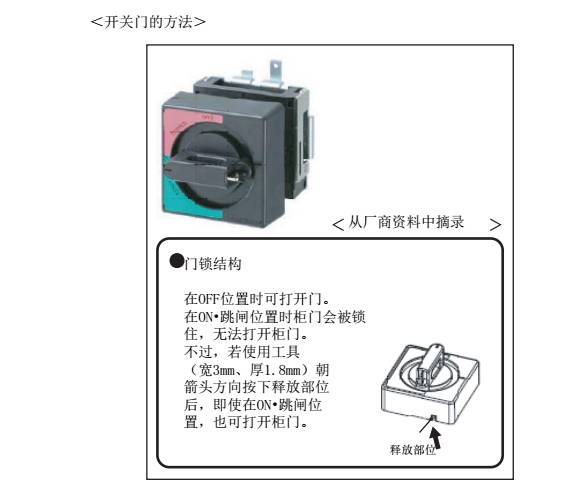
注意:控制器內(nèi)不執(zhí)行作業(yè)時,其前門必須保持關(guān)閉
(二)示教器清潔
應從實際需要出發(fā)按適當?shù)念l度清潔示教器;
盡管面板漆膜能耐受大部分溶劑的腐蝕,但仍應避免接觸丙酮等強溶劑;
若有條件,示教器不適用時應拆下并放置在干凈的場所。
(三)清洗控制器內(nèi)部
應根據(jù)環(huán)境條件按適當間隔清潔控制器內(nèi)部,如每年一次;
須特別注意冷卻風扇和進風口/出風口清潔。清潔時使用除塵刷,并用吸塵器吸去刷下的灰塵。請勿用吸塵器直接清潔各部件,否則會導致靜電放電,進而損壞部件。
注意:清潔控制器內(nèi)部前,一定要切斷!
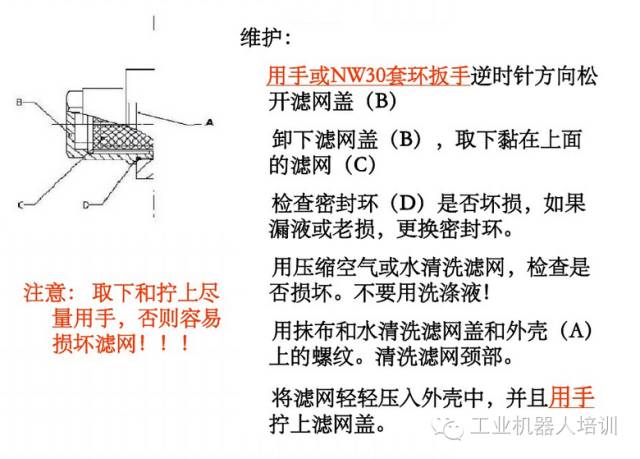
(四)清洗/更換濾布
驅(qū)動系統(tǒng)冷卻單元濾布的位置
1、找到控制柜北部的濾布;
2、提起并去除濾布架;
3、取下濾布架上的舊濾布;
4、將新濾布插入濾布架。
5、將裝有新濾布的濾布架滑入就位。
備注:除更換濾布外,也可選擇清洗濾布。詳細如下:
在加有清潔劑的30-40℃水中,清洗濾布3-4次。不得擰干濾布,可放置在平坦表面晾 干。還可以用潔凈的壓縮空氣將濾布吹干凈。
(五)更換電池
電池
測量系統(tǒng)電池為一次性電池(非充電電池);
電池更換時,消息日志會出現(xiàn)一條信息。該信息出現(xiàn)后電池電量可維持約1800小時。(建議在上述信息出現(xiàn)時更換電池)
電池僅在控制柜“斷電”的情況下工作。電池的使用壽命約7000小時。
如果控制柜除控制機器人外還控制CBS單元,或在使用8軸機器人的情況下,電池的使用壽命為上文所述的一般(使用2各SMU單元)。
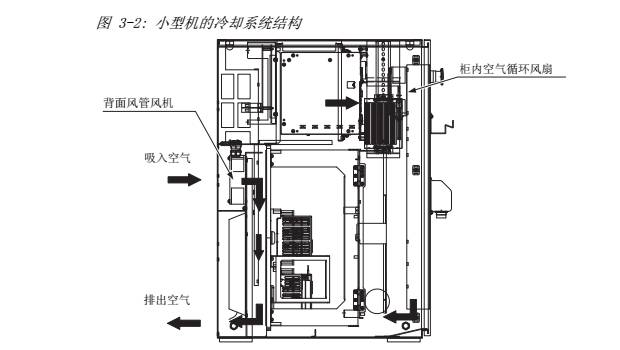
(六)檢查冷卻器
冷卻回路采用免維護密閉系統(tǒng)設(shè)計,需按要求定期檢查和清潔外部空氣回路的各個部件;
環(huán)境濕度較大時,需檢查排水口是否定期排水。
操作程序:
1、拆下冷卻器外殼的百葉窗,斷開顯示器接頭;
2、從百葉窗取下濾布(若有),用吸塵器清潔濾布,或視需要更換‘
3、擰下4各螺釘,卸下外部回路風扇(1);
4、卸下風扇(2);
5、拔下風扇接頭(3);
6、擰下4各螺釘,取下蓋板(4);
7、將顯示器電纜向后推,穿過電纜接頭;
8、拆下冷卻器外殼的蓋板;
9、拆下蓋板與外殼間的接地電纜;
10、用吸塵器或壓縮空氣清理百葉窗、蓋板、風扇、熱交換器盤管(5)和壓縮機室。可使用去油劑等不易燃洗滌劑去除頑固油污。
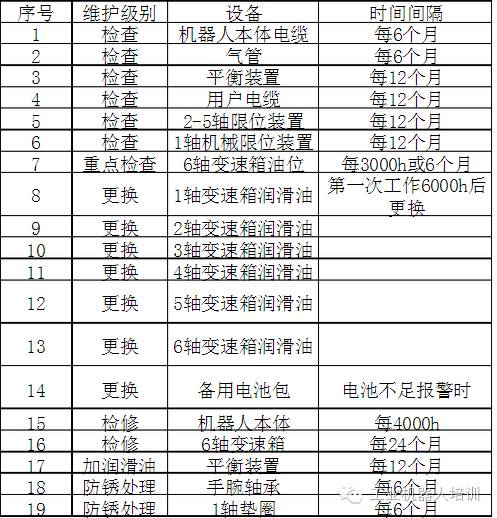
2 機器人本體維護保養(yǎng)
① 一般維護,1次/1天;
② 軸制動測試,1次/1天;
③ 潤滑3周副齒輪和齒輪,1次/1000H;
④ 潤滑中空手腕,1次/500H;
⑤ 各齒輪箱內(nèi)的潤滑油,第一次1年更換,以后每5年更換一次。
1、時間間隔主要取決于環(huán)境條件;
2、視機器人運行時數(shù)和溫度而定;
3、適當確定機器人的運行順暢與否。
(一)一般維護
1、清洗機械手
應定期清洗機械手底座和手臂。
使用溶劑時需謹慎操作。
應避免使用丙酮等強溶劑。
可使用高壓清洗設(shè)備,但應避免直接向機械手噴射。
如果機械手有油脂膜等保護,按要求去除。(應避免使用塑料保護)
為防止產(chǎn)生靜電,必須使用浸濕或潮濕的抹布擦拭非導電表面,如噴涂設(shè)備、軟管等。請勿使用干布。
2、中空手腕
如有必要,中空手腕視需要經(jīng)常清洗,以避免灰塵和顆粒物堆積。
用不起毛布料進行清潔。
手腕清洗后,可在手腕表面添加少量凡士林或類似物質(zhì),以后清洗時將更加方便。
3、定期檢查
視需要經(jīng)常檢查下列要點:
檢查是否漏油,如發(fā)現(xiàn)嚴重漏油,應向維修人員求助;
檢查齒輪游隙是否過大,如發(fā)現(xiàn)游隙過大,應向維修人員求助;
檢查控制柜、吹掃單元、工藝柜和機械手間的電纜是否受損。
4、檢查基礎(chǔ)固定螺釘
將機械手固定于基礎(chǔ)上的緊固螺釘和固定夾必須保持清潔,不可接觸水、酸堿溶液等腐蝕性液體。這樣可避免緊固件服飾。
如果鍍鋅層或涂料等防腐蝕保護層受損,需清潔相關(guān)零件并涂以防腐蝕涂料。
(二)軸制動測試
在操作過程中,每個軸電機制動器都會正常磨損。為確定制動器是否正常工作,此時必須進行測試。
測試方法:按照以下所述檢查每個軸馬達的制動器
1、運行機械手軸至相應位置,該位置機械手臂總重及所有負載量達到最大值(最大靜態(tài)負載);
2、馬達斷電;
3、檢查所有軸是否維持在原為。
如馬達斷電時機械手仍沒有改變位置,則制動力矩足夠。
還可手動移動機械手,檢查是否還需要進一步保護措施。
當移動機器人緊急停止時,制動器會幫助停止,因此可能會產(chǎn)生磨損。所以,在機器使用壽命期間需要反復測試,以檢驗機器是否維持著原來的能力。
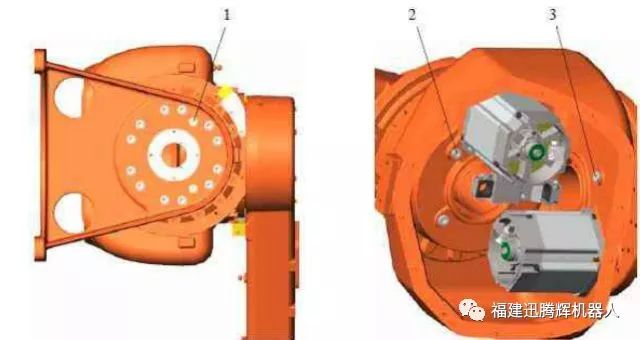
(三)潤滑3軸副齒輪和齒輪
工具和用品:
K-NATE(或Omega 77)潤滑脂;
潤滑脂泵。
步驟:
警告!開始執(zhí)行下列程序前,確保機器人及相關(guān)系統(tǒng)關(guān)閉并處于鎖定狀態(tài)。
1、將制定類型潤滑脂注入潤滑脂泵;
2、每個油嘴中擠入少許(1克)潤滑脂,諸葛潤滑副齒輪滑脂嘴 ① 和4各齒輪滑脂嘴 ② 。
小心!不要注入太多,一面損壞密封。
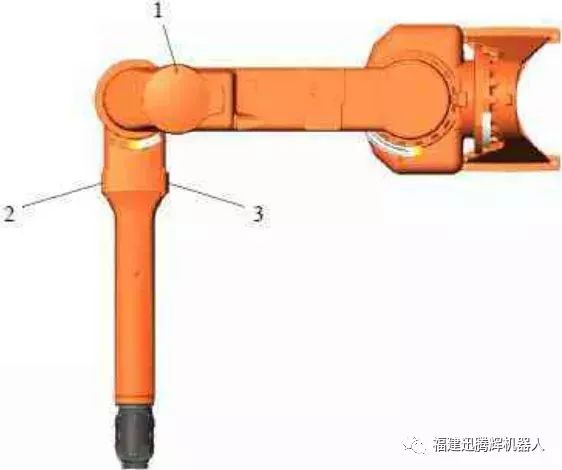
(四)潤滑中空手腕
中空手腕10個潤滑點
工具和用品:
K-NATE(或Omega 77)潤滑脂;
潤滑脂泵。
小心!每個注脂嘴只需幾滴潤滑劑(1克)。不要注入過量潤滑劑,否則會損壞腕部密封和內(nèi)部套筒。
在將軸④、⑤、⑥分別轉(zhuǎn)動90°、180°、270°后,再潤滑。
(五)檢查齒輪箱內(nèi)油位
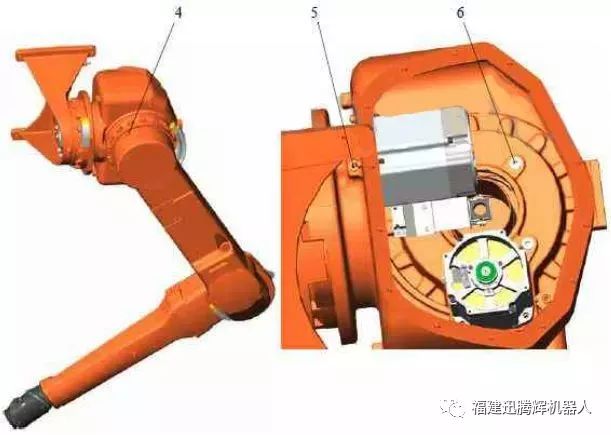
1軸 和 2軸 齒輪箱上的加油塞位置
1軸:打開加油塞① 和加油塞③ 或⑤;
2軸:打開加油塞④ 和加油塞② 或⑥。
3軸、4軸、5軸、6軸齒輪箱上的加油塞位置
3軸:打開加油塞①;
4、5、6軸:打開加油塞② 或③。
(3軸臂必須水平放置。)
IRB 5500
第1、2軸的齒輪箱裝運前加注:Shell Tivela S150。
其它軸的齒輪箱裝運前家住了:Shell Omela 320潤滑油
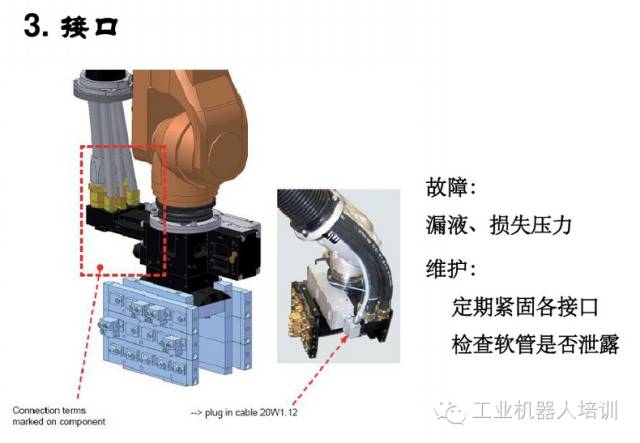
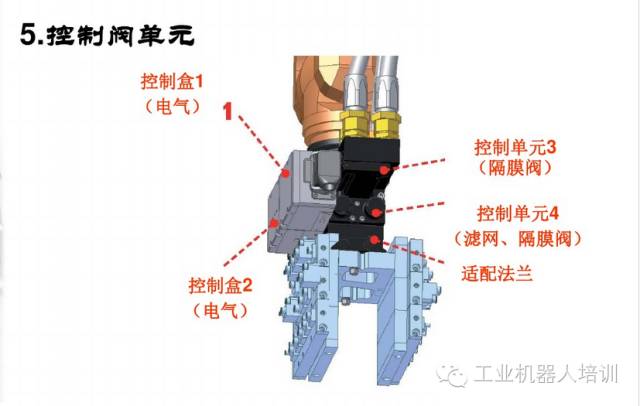
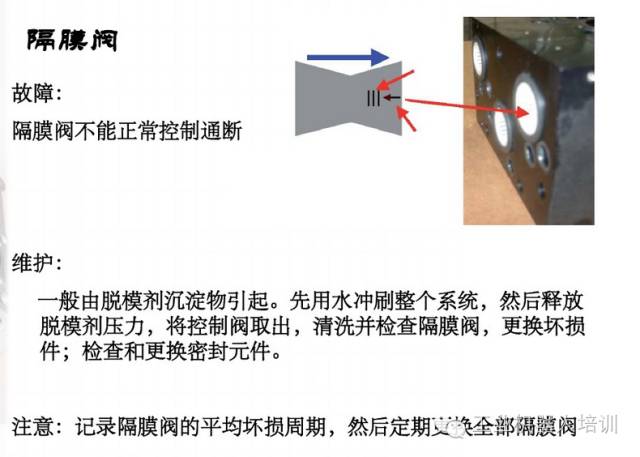
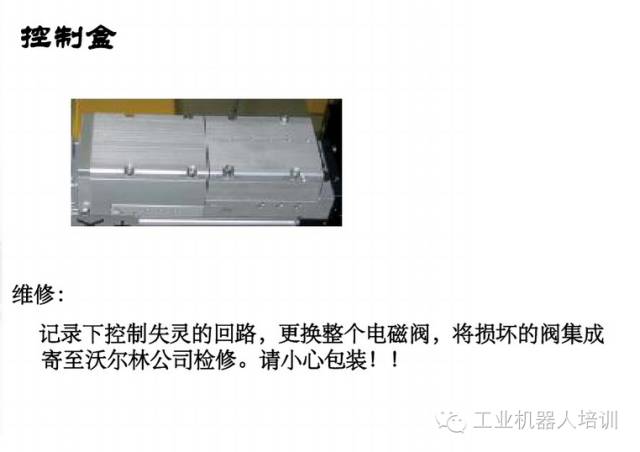
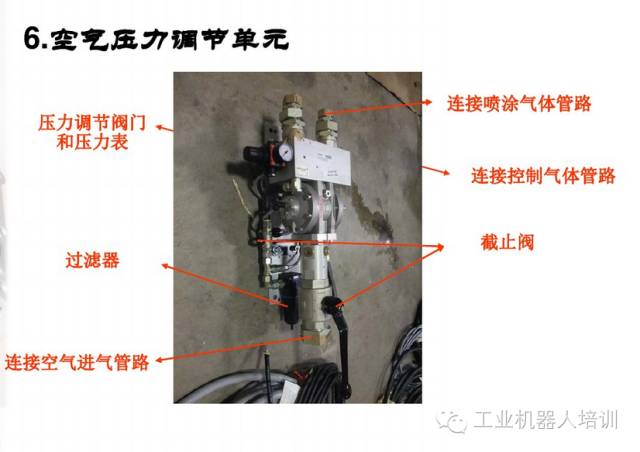
3 工業(yè)機器人噴涂系統(tǒng)的維護保養(yǎng)




4 ABB機器人維護指南
前言
本手冊包含了關(guān)于機械和電氣上的維護及維修說明
在維護及維修機器人前,請閱讀本手冊
本手冊適用于:
* 用戶自己的維修人員
* 其它維修人員
閱讀者需要:
* 是有一定技能的維修人員
* 有機械維修方面的知識
* 有電氣維修方面的知識
第一章:安全、維護
1、有危險的安全
2、鉗子的安全

3、工具/工作件的安全
見用戶安全指南
4、氣動/液壓系統(tǒng)的安全
見用戶安全指南
5、操作中的一些危險
見用戶安全指南
6、安裝及維護過程中的危險
見用戶安全指南
7、電氣元件的危險
見用戶安全指南
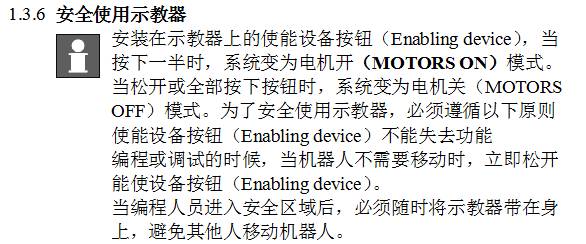
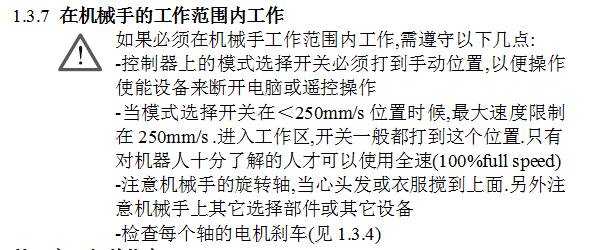
8、剎車檢查
正常運行前,需檢查電機剎車
每個軸的電機剎車檢查方法如下:
a、運行每個機械手的軸到它負載最大的位置
b、將機器人控制器上的電機模式選擇開關(guān)打到電機關(guān)(MOTORS OFF)的位置
c、檢查軸是否在其原來的位置
如果電機關(guān)掉后,機械手仍保持其位置,說明剎車良好。
9、失去減速運行(250mm/s)功能的危險

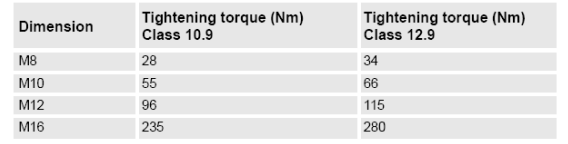
第二章、相關(guān)信息
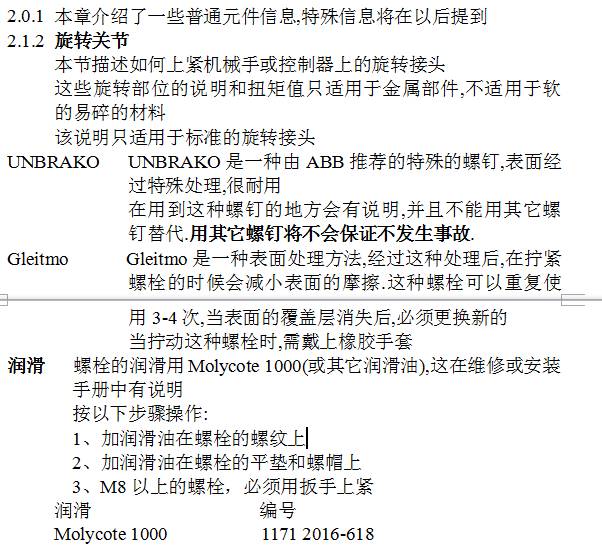
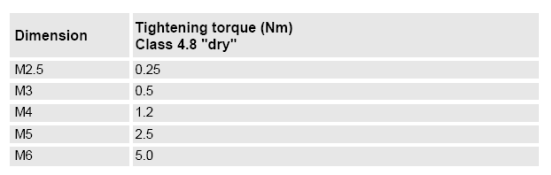
以下的表格描述不同螺栓的扭矩值,平口及十字型螺栓
六角套筒型螺栓
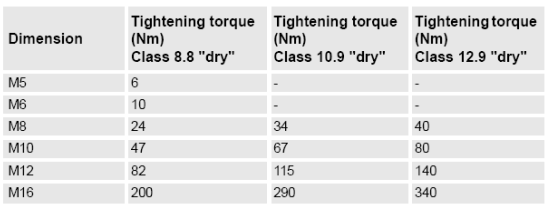
六角套筒型并帶潤滑的螺栓
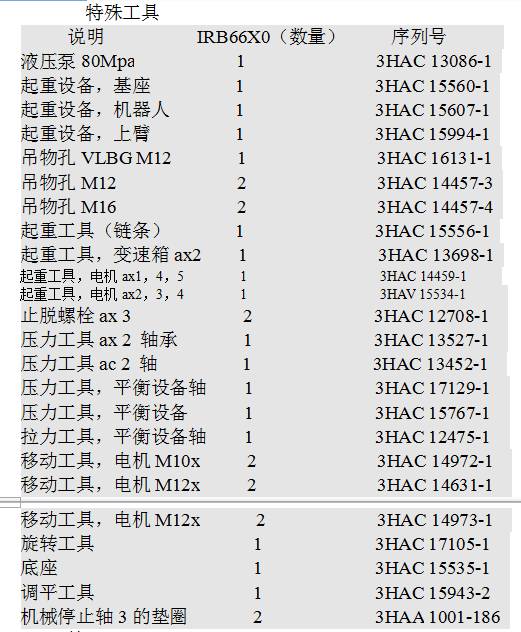
10、標準工具 IRB6600/6650/7600
以下包含了一些標準工具

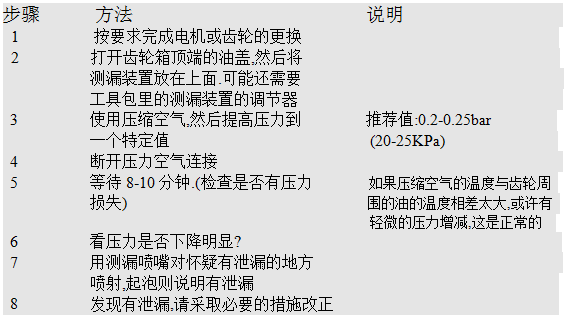
11、檢漏測試
當更換或修理電機或變速箱后,必須對變速箱內(nèi)的油作個檢查,這就是檢漏測試
所需設(shè)備為專門的檢查裝置,序列號為3HAC 0207-1
方法及步驟
12、起重設(shè)備
不同的修理及維護工作需要不同的起重設(shè)備,這在維修指南中有指明,但怎樣使用在維修指南中沒有說明,所以一定要保留這些工具的使用說明書
第三章、維護信息系統(tǒng)(SIS)
1、使用SIS系統(tǒng)
這是一個簡短的維護信息系統(tǒng)(SIS)的使用說明,詳細的資料可在以下幾處找到:
* 維護信息系統(tǒng),SIS
* 定義SIS輸入?yún)?shù)
* 設(shè)置SIS參數(shù)
* SIS參數(shù)的交換
* 讀出SIS的輸出日志
基本方法及步驟
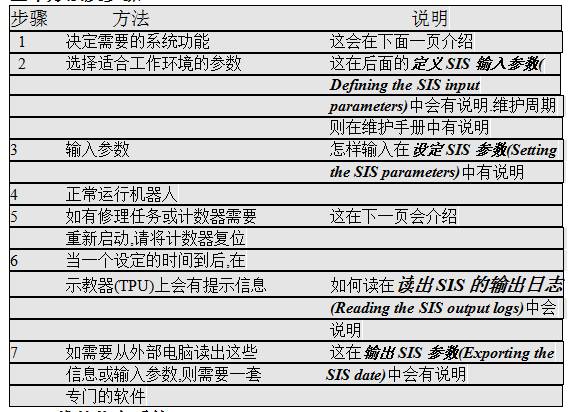
2、維護信息系統(tǒng)(SIS)
維護信息系統(tǒng)(SIS)是一個在機器人控制器里的軟件功能,其簡
單化了機器人系統(tǒng)的維護.其管理工作時間及模式,并在預定的
維護時間到后為提醒操作人員
5 機器人維護維修學習資料



上一篇:人形機器人行業(yè)深度報告
中國傳動網(wǎng)版權(quán)與免責聲明:凡本網(wǎng)注明[來源:中國傳動網(wǎng)]的所有文字、圖片、音視和視頻文件,版權(quán)均為中國傳動網(wǎng)(www.hysjfh.com)獨家所有。如需轉(zhuǎn)載請與0755-82949061聯(lián)系。任何媒體、網(wǎng)站或個人轉(zhuǎn)載使用時須注明來源“中國傳動網(wǎng)”,違反者本網(wǎng)將追究其法律責任。
本網(wǎng)轉(zhuǎn)載并注明其他來源的稿件,均來自互聯(lián)網(wǎng)或業(yè)內(nèi)投稿人士,版權(quán)屬于原版權(quán)人。轉(zhuǎn)載請保留稿件來源及作者,禁止擅自篡改,違者自負版權(quán)法律責任。
產(chǎn)品新聞
更多>
顛覆傳統(tǒng)加工!維宏VHTube一鍵實現(xiàn)變徑...
2025-06-16

2025-06-09

2025-06-06

2025-05-19

2025-04-30

性能躍升20%!維宏NK300CX Plus數(shù)控系統(tǒng)...
2025-04-11
網(wǎng)站簡介|會員服務(wù)|聯(lián)系方式|幫助信息|版權(quán)信息|網(wǎng)站地圖|友情鏈接|法律支持|意見反饋|sitemap
傳動網(wǎng)-工業(yè)自動化與智能制造的全媒體“互聯(lián)網(wǎng)+”創(chuàng)新服務(wù)平臺
Chuandong.com Copyright ?2005 - 2025 ,All Rights Reserved 深圳市奧美大唐廣告有限公司 版權(quán)所有 粵ICP備 14004826號 | 營業(yè)執(zhí)照證書 | 不良信息舉報中心 |  粵公網(wǎng)安備 44030402000946號
粵公網(wǎng)安備 44030402000946號












 網(wǎng)站客服
網(wǎng)站客服