 您現(xiàn)在的位置:
中國(guó)傳動(dòng)網(wǎng)
>
技術(shù)頻道
>
應(yīng)用方案
>
機(jī)器視覺(jué)在自動(dòng)化測(cè)量系統(tǒng)的控制器選擇
您現(xiàn)在的位置:
中國(guó)傳動(dòng)網(wǎng)
>
技術(shù)頻道
>
應(yīng)用方案
>
機(jī)器視覺(jué)在自動(dòng)化測(cè)量系統(tǒng)的控制器選擇
時(shí)間:2018-01-16 10:54:27來(lái)源:網(wǎng)絡(luò)轉(zhuǎn)載
機(jī)器視覺(jué)在自動(dòng)化測(cè)量系統(tǒng)中的應(yīng)用日益普及。其原因是越來(lái)越多的信息需要從相機(jī)中提取,而不是從一個(gè)專用傳感器中提取。相機(jī)可以用于提取溫度信息、測(cè)量尺寸,并檢查對(duì)象存在與否,同時(shí)也提供了許多其它有用的信息。這使其廣泛應(yīng)用于質(zhì)量檢測(cè)、機(jī)械控制和機(jī)器人引導(dǎo)等應(yīng)用中,所有這些應(yīng)用在選擇控制硬件和軟件時(shí)都有獨(dú)特的需求和挑戰(zhàn)。本文概述了其中一些考量因素來(lái)幫助您選擇最適合您機(jī)器視覺(jué)系統(tǒng)的控制器。
1.什么是視覺(jué)系統(tǒng)?
視覺(jué)系統(tǒng)由一個(gè)或多個(gè)用于圖像采集的相機(jī)以及一個(gè)用于運(yùn)行采集和分析軟件的控制器組成。這些系統(tǒng)可以有多種組成結(jié)構(gòu),但最常見(jiàn)的是智能相機(jī),在智能相機(jī)中,相機(jī)和控制器集成到一個(gè)裝置中,相機(jī)通過(guò)幀接收器或以太網(wǎng)、USB等其他連接端口連接到臺(tái)式計(jì)算機(jī)或工業(yè)PC,甚至相機(jī)可直接連接到可編程邏輯控制器(PLC)等工業(yè)控制設(shè)備,由控制器管理圖像采集以及片I/O和測(cè)量設(shè)備。
您可以使用這些系統(tǒng)來(lái)解決類似的應(yīng)用,但每個(gè)系統(tǒng)的功能各不相同,使之更適合于某些使用場(chǎng)景。選擇最適合您應(yīng)用的控制器時(shí),需要考慮您的需求并將這些需求匹配到最適合任務(wù)需求的控制器。雖然最明顯的考量因素是控制器的處理能力,但其他因素也對(duì)控制器的選擇影響甚大,比如所支持的相機(jī)、I/O功能和與現(xiàn)有基礎(chǔ)設(shè)施集成的能力。
2.處理能力
強(qiáng)大的處理能力可以直接影響可運(yùn)行的算法以及視覺(jué)系統(tǒng)做出決策的速度。單相機(jī)條碼檢測(cè)系統(tǒng)所需的處理能力顯然比多相機(jī)立體視覺(jué)系統(tǒng)要低得多。此外,I/O或閉環(huán)運(yùn)動(dòng)控制等機(jī)器視覺(jué)系統(tǒng)需要更高的處理能力來(lái)確保視覺(jué)組件以及I/O和運(yùn)動(dòng)控制組件可以穩(wěn)定地運(yùn)行。為了減少圖像處理時(shí)間,一些廠商現(xiàn)在使用同構(gòu)處理來(lái)運(yùn)行視覺(jué)算法。同構(gòu)處理方法使用CPU和GPU、FPGA或DSP的組合來(lái)處理圖像,速度比單獨(dú)使用其中某個(gè)組件要快得多。同構(gòu)處理減少了圖像處理所需的時(shí)間,甚至可以允許圖像用作為閉環(huán)控制算法的輸入。在選擇視覺(jué)系統(tǒng)所需的控制器之前,充分理解要使用的算法以及系統(tǒng)運(yùn)行這些算法所需的時(shí)間是很重要的。
3.支持的相機(jī)
圖像采集所使用的相機(jī)數(shù)量和通信總線類型也會(huì)影響控制器的選擇。在您選擇了應(yīng)用所需的相機(jī)后,請(qǐng)確保控制器能夠支持相機(jī)所使用的通信總線。機(jī)器視覺(jué)應(yīng)用中兩個(gè)常用的工業(yè)標(biāo)準(zhǔn)總線是USB3Vision和GigEVisio。這些標(biāo)準(zhǔn)可允許控制器使用標(biāo)準(zhǔn)USB3.0或以太網(wǎng)端口來(lái)連接相機(jī),這兩種端口常見(jiàn)于消費(fèi)和工業(yè)計(jì)算機(jī)上。兩種標(biāo)準(zhǔn)可以通過(guò)集線器或交換機(jī)來(lái)將多臺(tái)相機(jī)連接至一個(gè)端口。這是在系統(tǒng)中添加更多相機(jī)的一種可行方法,但請(qǐng)記住,連接到集線器的每個(gè)相機(jī)都會(huì)與同一個(gè)集線器的其他相機(jī)共享帶寬。此外,大多數(shù)消費(fèi)級(jí)交換機(jī)并不支持以太網(wǎng)供電(PoE)等特定功能。如果您打算使用這些功能,或者您的系統(tǒng)沒(méi)有足夠的帶寬來(lái)讓多個(gè)相機(jī)共享,則可能要選擇一個(gè)具有多個(gè)獨(dú)立控制端口的控制器,使得每個(gè)相機(jī)都能夠獲得完整的帶寬。
4.I/O功能
大多數(shù)機(jī)器視覺(jué)系統(tǒng)需要一些基本的數(shù)字I/O來(lái)觸發(fā)相機(jī)或讀取編碼器。一個(gè)例子是視覺(jué)系統(tǒng)使用安裝在傳送帶上方的相機(jī)來(lái)檢測(cè)所傳送的零件。這其中的難點(diǎn)在于如何讓相機(jī)在零件移動(dòng)到相機(jī)正下方時(shí)拍攝圖像,除非系統(tǒng)可以跟蹤輸送帶的位置。這個(gè)問(wèn)題的一種常見(jiàn)解決方法是使用編碼器來(lái)讀取傳送帶的位置并以與傳送機(jī)上放置零件的時(shí)間間隔來(lái)觸發(fā)相機(jī)。如果零件在傳送機(jī)上的間隔不均勻,則可使用接近式傳感器來(lái)觸發(fā)相機(jī)。
有些機(jī)器視覺(jué)系統(tǒng)可能需要更高級(jí)的I/O功能。在一些材料分析應(yīng)用中,通常需要將圖像與測(cè)量數(shù)據(jù)同步,以便圖像中的事件可以與測(cè)量數(shù)據(jù)相關(guān)聯(lián)。設(shè)想一個(gè)使用相機(jī)和應(yīng)變計(jì)來(lái)測(cè)量施加外力時(shí)復(fù)合材料的彎曲程度和負(fù)載的應(yīng)用。這些同步的數(shù)據(jù)可以用來(lái)了解材料在外力作用下的行為,甚至可以測(cè)量出材料的斷裂點(diǎn)。這種級(jí)別的同步需要圖像采集和I/O之間能夠緊密集成,使得測(cè)量數(shù)據(jù)可以精確地進(jìn)行時(shí)間標(biāo)記或者相機(jī)和測(cè)量設(shè)備之間能夠共享同一個(gè)時(shí)鐘。選擇控制器之前需要了解您的I/O和同步需求。對(duì)于觸發(fā)或非同步測(cè)量等基本I/O需求,可以選擇具有集成式或網(wǎng)絡(luò)分布式I/O的控制器。對(duì)于更復(fù)雜的I/O需求,可選擇具有集成式I/O或通過(guò)EtherCAT等確定性通信協(xié)議連接I/O設(shè)備的控制器。
5.系統(tǒng)集成
理想情況下,我們希望來(lái)自不同廠商的硬件和軟件能夠奇跡般地自動(dòng)相互支持,以允許數(shù)據(jù)完美共享,但事實(shí)并非如此。通常情況下,機(jī)器視覺(jué)系統(tǒng)必須被添加到現(xiàn)有基礎(chǔ)設(shè)施,而這些基礎(chǔ)設(shè)施包含了來(lái)自不同廠商的系統(tǒng),每個(gè)系統(tǒng)使用專用的接口。這種集成極具挑戰(zhàn)性,但值得慶幸的是,以太網(wǎng)/IP和Modbus等標(biāo)準(zhǔn)通訊協(xié)議的出現(xiàn)使得這個(gè)過(guò)程變得更為容易。確保您充分了解現(xiàn)有的基礎(chǔ)設(shè)施,并選擇一個(gè)可以與其集成的視覺(jué)控制器。同時(shí)所選的控制器應(yīng)可支持各種工業(yè)通信協(xié)議,以確保最佳的集成效果。
6.產(chǎn)品比較
CVS、CompactRIO和NI工業(yè)控制器均是NI針對(duì)視覺(jué)系統(tǒng)提供的產(chǎn)品。正如前面所說(shuō)的,處理能力和相機(jī)的數(shù)量會(huì)直接影響機(jī)器視覺(jué)系統(tǒng)的整體性能。為了理解這些產(chǎn)品之間的差異,可以看一下它們用作為取放機(jī)器的控制器時(shí)的性能,取放機(jī)器需要使用一個(gè)或多個(gè)相機(jī)來(lái)識(shí)別要拾取的零件。機(jī)器的整體性能通過(guò)每秒可識(shí)別的零件數(shù)量來(lái)衡量。
下圖顯示理論上該機(jī)器所能達(dá)到的性能。該圖表顯示了一個(gè)桌面級(jí)處理器分別采用主動(dòng)冷卻系統(tǒng)和被動(dòng)冷卻系統(tǒng)時(shí)可實(shí)現(xiàn)的性能。

可以看到,NI工業(yè)控制器提供的性能接近于采用被動(dòng)冷卻封裝的桌面級(jí)處理器可達(dá)到的性能。豐富的相機(jī)連接端口選項(xiàng)以及高性能處理器使其成為圖表上所有產(chǎn)品中最強(qiáng)大的控制器,但這些都并不是唯一要考慮的特性。
現(xiàn)在,看一下下表中這些產(chǎn)品的集成I/O、存儲(chǔ)器和特定視覺(jué)功能,比如PoE。
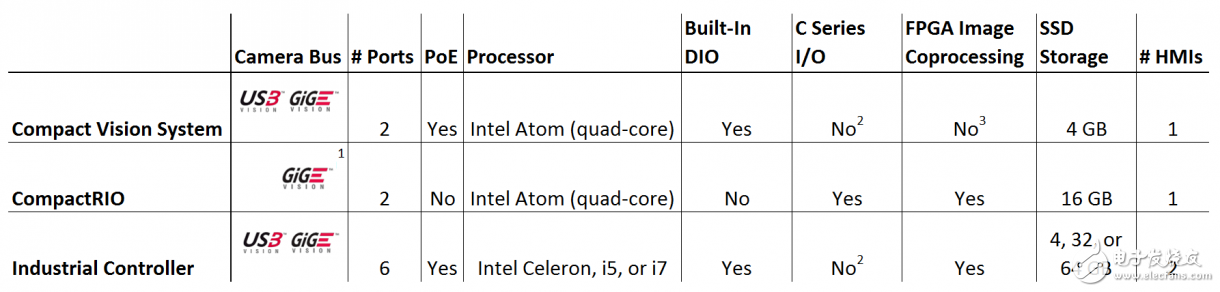
1高性能CompactRIO控制器還可支持USB3Vision相機(jī),可向后兼容USB2.0。
2盡管Compact視覺(jué)系統(tǒng)和工業(yè)控制器不具有用于C系列I/O的集成插槽,但是它們也可用于以太網(wǎng)或EtherCAT擴(kuò)展機(jī)箱。
3Compact視覺(jué)系統(tǒng)提供了有限的FPGA圖像處理支持,但由于FPGA的尺寸小,協(xié)處理帶寬有限,因而只能小幅提升性能。
每個(gè)應(yīng)用需求都決定著哪個(gè)控制器最適合您的應(yīng)用。下面提供了每個(gè)產(chǎn)品的詳細(xì)概述。

7.Compact視覺(jué)系統(tǒng)
CVS是一款經(jīng)視覺(jué)優(yōu)化的工業(yè)計(jì)算機(jī),提供兩個(gè)獨(dú)立控制的GigE或USB3.0端口來(lái)連接相機(jī)。CVS擁有一個(gè)強(qiáng)大的四核處理器,提供了高需求應(yīng)用所需的性能,同時(shí)也具有一個(gè)用于連接人機(jī)界面的內(nèi)置VGA端口和用于連接鼠標(biāo)和鍵盤的USB2.0端口。CVS還包括基于FPGA的數(shù)字I/O,可用于讀取編碼器和實(shí)現(xiàn)自定義觸發(fā)。雖然CVS缺少用于C系列I/O的集成插槽,但可通過(guò)連接以太網(wǎng)或EtherCAT擴(kuò)展機(jī)箱來(lái)將C系列I/O添加到系統(tǒng)中。
此外,系統(tǒng)還可以使用Ethernet/IP、RS232/RS485、Modbus串行、Modbus/TCP等工業(yè)協(xié)議來(lái)傳送指令與數(shù)據(jù)給其他設(shè)備,比如可編程邏輯控制器(PLC)與操作界面。CVS還具有一個(gè)用于網(wǎng)絡(luò)連接的專用千兆位以太網(wǎng)端口以及兩個(gè)用于連接外部數(shù)據(jù)存儲(chǔ)器的高速USB端口。通過(guò)企業(yè)連接功能,您還可監(jiān)測(cè)檢測(cè)結(jié)果、查看圖像或是把數(shù)據(jù)儲(chǔ)存在數(shù)據(jù)庫(kù)中進(jìn)行統(tǒng)計(jì)過(guò)程控制。
8.CompactRIO
CompactRIO適用于需要強(qiáng)大處理能力以及模塊化I/O來(lái)實(shí)現(xiàn)自動(dòng)化、測(cè)量和控制任務(wù)的應(yīng)用。最新的高性能CompactRIO型號(hào)搭載與CVS相同的四核IntelAtom處理器,并提供了與GigEVision相機(jī)和USB3Vision相機(jī)的連接端口,可向后兼容USB2.0。
此外,CompactRIO提供了可支持?jǐn)?shù)百個(gè)C系列I/O模塊的8個(gè)插槽,使您可以通過(guò)任何總線連接任何傳感器。CompactRIO還具有內(nèi)置的用戶可編程FPGA,可更快速處理圖像。這意味著CPU和FPGA可以相互配合來(lái)共同處理圖像,減少處理時(shí)間。CompactRIO可以通過(guò)內(nèi)置的RS232/RS485端口或工業(yè)通信C系列模塊輕松地與PLC和操作界面集成。CompactRIO還具有一個(gè)用于網(wǎng)絡(luò)連接的專用千兆位以太網(wǎng)端口以及兩個(gè)用于連接外部數(shù)據(jù)存儲(chǔ)器的高速USB端口。通過(guò)企業(yè)連接功能,您還可監(jiān)測(cè)檢測(cè)結(jié)果、查看圖像或是把數(shù)據(jù)儲(chǔ)存在數(shù)據(jù)庫(kù)中進(jìn)行統(tǒng)計(jì)過(guò)程控制。
9.工業(yè)控制器
與CVS相似,NI工業(yè)控制器也是經(jīng)過(guò)視覺(jué)優(yōu)化的工業(yè)計(jì)算機(jī)。該控制器具有四個(gè)獨(dú)立控制的千兆以太網(wǎng)端口、兩個(gè)USB3.0端口、一個(gè)Inteli7處理器以及一個(gè)XilinxKintex-7FPGA,這使其成為NI為視覺(jué)應(yīng)用提供的最強(qiáng)大的嵌入式控制器。雖然NI工業(yè)控制器缺少用于C系列I/O的集成插槽,但可通過(guò)連接以太網(wǎng)或EtherCAT擴(kuò)展機(jī)箱來(lái)將I/O添加到系統(tǒng)中。工業(yè)控制器的大型FPGA和強(qiáng)大的處理器相結(jié)合,可更快速地處理圖像,從而降低延遲。
此外,系統(tǒng)還可以使用Ethernet/IP、RS232/RS485、Modbus串行、Modbus/TCP等工業(yè)協(xié)議來(lái)傳送指令與數(shù)據(jù)給其他設(shè)備,比如PLC與操作界面。工業(yè)控制器還具有一個(gè)用于網(wǎng)絡(luò)連接的專用千兆位以太網(wǎng)端口以及四個(gè)用于連接外部數(shù)據(jù)存儲(chǔ)器的USB2.0端口。通過(guò)企業(yè)連接功能,您還可監(jiān)測(cè)檢測(cè)結(jié)果、查看圖像或是把數(shù)據(jù)儲(chǔ)存在數(shù)據(jù)庫(kù)中進(jìn)行統(tǒng)計(jì)過(guò)程控制。NI工業(yè)控制器適用于需要高速處理的高性能多相機(jī)應(yīng)用。
標(biāo)簽:
![]()
中國(guó)傳動(dòng)網(wǎng)版權(quán)與免責(zé)聲明:凡本網(wǎng)注明[來(lái)源:中國(guó)傳動(dòng)網(wǎng)]的所有文字、圖片、音視和視頻文件,版權(quán)均為中國(guó)傳動(dòng)網(wǎng)(www.hysjfh.com)獨(dú)家所有。如需轉(zhuǎn)載請(qǐng)與0755-82949061聯(lián)系。任何媒體、網(wǎng)站或個(gè)人轉(zhuǎn)載使用時(shí)須注明來(lái)源“中國(guó)傳動(dòng)網(wǎng)”,違反者本網(wǎng)將追究其法律責(zé)任。
本網(wǎng)轉(zhuǎn)載并注明其他來(lái)源的稿件,均來(lái)自互聯(lián)網(wǎng)或業(yè)內(nèi)投稿人士,版權(quán)屬于原版權(quán)人。轉(zhuǎn)載請(qǐng)保留稿件來(lái)源及作者,禁止擅自篡改,違者自負(fù)版權(quán)法律責(zé)任。
相關(guān)資訊
產(chǎn)品新聞
更多>

2025-06-09

從外觀到內(nèi)核的「超進(jìn)化」!NK550M五軸...
2025-06-06

2025-05-19

2025-04-30

性能躍升20%!維宏NK300CX Plus數(shù)控系統(tǒng)...
2025-04-11
網(wǎng)站簡(jiǎn)介|會(huì)員服務(wù)|聯(lián)系方式|幫助信息|版權(quán)信息|網(wǎng)站地圖|友情鏈接|法律支持|意見(jiàn)反饋|sitemap
傳動(dòng)網(wǎng)-工業(yè)自動(dòng)化與智能制造的全媒體“互聯(lián)網(wǎng)+”創(chuàng)新服務(wù)平臺(tái)
 網(wǎng)站客服服務(wù)咨詢采購(gòu)咨詢媒體合作
網(wǎng)站客服服務(wù)咨詢采購(gòu)咨詢媒體合作
Chuandong.com Copyright ?2005 - 2025 ,All Rights Reserved 深圳市奧美大唐廣告有限公司 版權(quán)所有 粵ICP備 14004826號(hào) | 營(yíng)業(yè)執(zhí)照證書 | 不良信息舉報(bào)中心 |  粵公網(wǎng)安備 44030402000946號(hào)
粵公網(wǎng)安備 44030402000946號(hào)










