


開(kāi)放式運(yùn)動(dòng)控制器提供給用戶很大的靈活性,它的運(yùn)動(dòng)控制軟件全部裝在計(jì)算機(jī)中,而硬件部分僅是計(jì)算機(jī)與伺服驅(qū)動(dòng)和外部IO之間的標(biāo)準(zhǔn)化通用接口,如同計(jì)算機(jī)中可以安裝各種品牌的聲卡、CDROM和相應(yīng)的驅(qū)動(dòng)程序一樣。用戶可以在Windows平臺(tái)和其他操作系統(tǒng)的支持下,利用開(kāi)放的運(yùn)動(dòng)控制內(nèi)核,開(kāi)發(fā)所需的控制功能,構(gòu)成各種類型的高性能運(yùn)動(dòng)控制系統(tǒng),從而提供給用戶更多的選擇和靈活性。
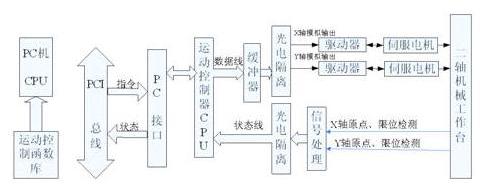
開(kāi)放式運(yùn)動(dòng)控制系統(tǒng)整個(gè)系統(tǒng)以基于“PC機(jī)+運(yùn)動(dòng)控制器”為核心,采用NI公司NI7340系列運(yùn)動(dòng)控制器NI7342、Telemecanique驅(qū)動(dòng)器和交流伺服電動(dòng)機(jī)構(gòu)成一個(gè)開(kāi)放式硬件結(jié)構(gòu)。在該伺服控制系統(tǒng)中,控制器上專用CPU與PC機(jī)CPU構(gòu)成主從式雙CPU控制模式。PC機(jī)負(fù)責(zé)人機(jī)交互界面的管理和控制系統(tǒng)的實(shí)時(shí)監(jiān)控等方面的工作,例如鍵盤(pán)和鼠標(biāo)的管理、系統(tǒng)狀態(tài)的顯示、控制指令的發(fā)送和外部信號(hào)IO的監(jiān)控等。
運(yùn)動(dòng)控制器配備內(nèi)容豐富、功能強(qiáng)大的運(yùn)動(dòng)函數(shù)庫(kù),供用戶使用完成電動(dòng)機(jī)的運(yùn)動(dòng)規(guī)劃。系統(tǒng)采取模擬量輸出的位置控制方式,模擬信號(hào)的大小控制電機(jī)的速度,信號(hào)的正負(fù)控制電機(jī)正反轉(zhuǎn),以實(shí)現(xiàn)二軸的位置控制。X軸和Y軸原點(diǎn)、限位檢測(cè)是通過(guò)一組機(jī)械來(lái)實(shí)現(xiàn),原點(diǎn)檢測(cè)開(kāi)關(guān)作為每個(gè)軸的零點(diǎn)位置,限位檢測(cè)開(kāi)關(guān)確保每軸工作行程極限。這些狀態(tài)信號(hào)送入運(yùn)動(dòng)控制卡狀態(tài)寄存器后由CPU隨時(shí)讀出,達(dá)到對(duì)IO狀態(tài)信號(hào)的檢測(cè)。在硬件上,運(yùn)動(dòng)控制器上的光電隔離措施既隔離了外設(shè)對(duì)內(nèi)部數(shù)字系統(tǒng)的干擾,有能有效防止過(guò)電壓、過(guò)電流等外界突發(fā)事件對(duì)計(jì)算機(jī)系統(tǒng)的損壞,大大提高了系統(tǒng)的控制精度和可靠性。
版權(quán)為中國(guó)傳動(dòng)網(wǎng)所有,本未經(jīng)授權(quán)不得轉(zhuǎn)載、摘編。已經(jīng)本網(wǎng)授權(quán)使用的,需注明原文出處“中國(guó)傳動(dòng)網(wǎng)”,并在文章底部增加原文地址連接。違反上述聲明者,本網(wǎng)將追究其相關(guān)法律責(zé)任。






























 網(wǎng)站客服
網(wǎng)站客服 粵公網(wǎng)安備 44030402000946號(hào)
粵公網(wǎng)安備 44030402000946號(hào)