時間:2018-01-24 10:34:58來源:網絡轉載
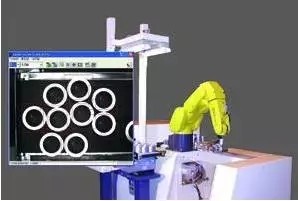
當我們談論日益熱門的工業4.0、智能制造這些話題時,機器人是一個無論如何也繞不開的問題。機器人的智能化程度影響著整個工業演化的進程,傳統的機器人僅能在嚴格定義的結構化環境中執行預定指令動作,缺乏對環境的感知與應變能力,這極大地限制了機器人的應用。利用機器人的視覺控制,不需要預先對工業機器人的運動軌跡進行示教或離線編程,可節約大量的編程時間,提高生產效率和加工質量。這就是我們標題中提到的,基于機器視覺的工業機器人定位技術。這一技術在國內最早被應用于焊接機器人對焊縫的跟蹤,而維視圖像的視覺采集設備及圖像處理軟件,成為行業內視覺引導的先驅和首選。
典型的機器人視覺定位系統構成如圖1所示,在關節型機器人末端安裝單個攝像機,使工件能完全出現在攝像機的圖像中。系統包括攝像機系統和控制系統:
(1)攝像機系統:由單個攝像機和計算機(包括圖像采集卡)組成,負責視覺圖像的采集和機器視覺算法。就目前行業技術發展水平來說,數字相機是比較理想的選擇,其中維視圖像的MV-EM/E系列工業相機提供了接口豐富的開發包函數,分辨率、幀率等覆蓋面廣,通用性及穩定性好,所以是我們推薦的首要選擇。
(2)控制系統:由計算機和控制箱組成,用來控制機器人末端的實際位置。經CCD攝像機對工作區進行拍攝,計算機通過圖像識別方法,提取跟蹤特征,進行數據識別和計算,通過逆運動學求解得到機器人各關節位置誤差值,最后控制高精度的末端執行機構,調整機器人的位姿。
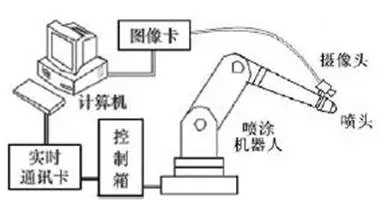
圖1機器人視覺定位系統組成
下面我們來詳細的解析一下視覺引導機器人的工作原理。首先,使用CCD攝像機(包括鏡頭等圖像采集設備)將視頻信號輸入計算機,并通過軟件對其快速處理。處理的過程是這樣的:選取被跟蹤物體的局部圖像,該步驟相當于離線學習的過程,在圖像中建立坐標系以及訓練系統尋找跟蹤物。學習結束后,相機不停地采集圖像,提取跟蹤特征,進行數據識別和計算,通過逆運動學求解得到機器人各關節位置給定值,最后控制高精度的末端執行機構,調整機器人的位姿。工作流程如下圖所示。
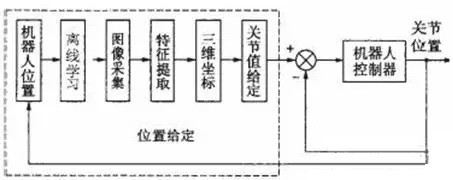
視覺定位系統軟件流程圖
這樣,視覺定位系統將基于區域的匹配和形狀特征識別結合,進行數據識別和計算,能夠快速準確地識別出物體特征的邊界與中心,機器人控制系統通過逆運動學求解得到機器人各關節位置的轉角誤差,最后控制高精度的末端執行機構,調整機器人的位姿以消除此誤差。從而解決了機器人末端實際位置與期望位置相距較遠的問題,改善了傳統機器人的定位精度。
標簽:
![]()
上一篇:機器視覺檢測系統實際應用概論
下一篇:自動化大樓中的PLC應用
中國傳動網版權與免責聲明:凡本網注明[來源:中國傳動網]的所有文字、圖片、音視和視頻文件,版權均為中國傳動網(www.hysjfh.com)獨家所有。如需轉載請與0755-82949061聯系。任何媒體、網站或個人轉載使用時須注明來源“中國傳動網”,違反者本網將追究其法律責任。
本網轉載并注明其他來源的稿件,均來自互聯網或業內投稿人士,版權屬于原版權人。轉載請保留稿件來源及作者,禁止擅自篡改,違者自負版權法律責任。
產品新聞
更多>
2025-06-16

2025-06-09

2025-06-06

2025-05-19

2025-04-30

2025-04-11












 網站客服
網站客服 粵公網安備 44030402000946號
粵公網安備 44030402000946號