首é |資訊|產å“|ä¼æ¥|å“牌|商機|技術|專題|è¦–é »|展會|媒體|論壇|下載

 您ç¾åœ¨çš„ä½ç½®ï¼š
ä¸åœ‹å‚³å‹•ç¶²
>
æŠ€è¡“é »é“
>
應用方案
>
伺æœé›»æ©Ÿç³»çµ±æ¸¬è©¦è§£æ±ºæ–¹æ¡ˆ
您ç¾åœ¨çš„ä½ç½®ï¼š
ä¸åœ‹å‚³å‹•ç¶²
>
æŠ€è¡“é »é“
>
應用方案
>
伺æœé›»æ©Ÿç³»çµ±æ¸¬è©¦è§£æ±ºæ–¹æ¡ˆ
時間:2017-12-06 10:32:04來æºï¼šç¶²çµ¡è½‰è¼‰
隨著伺æœé›»æ©ŸæŠ€è¡“的飛速發展,數控機床ã€å·¥æ¥æ©Ÿå™¨äººã€è‡ªå‹•åŒ–生產è¨å‚™é–‹å§‹å»£æ³›ä½¿ç”¨ä¼ºæœé›»æ©Ÿä½œç‚ºé‹å‹•æŽ§åˆ¶çš„é—œéµé›¶éƒ¨ä»¶ï¼Œè‡ªç„¶è€Œç„¶å°ä¼ºæœé›»æ©Ÿçš„性能è¦æ±‚也越來越高,尤其是其動態特性,æ¤æ™‚傳統測功機已然無法實ç¾ç›¸é—œæ¸¬è©¦ï¼ŒäºŽæ˜¯è¡Œæ¥å…§äºŸéœ€èƒ½å¤ æ供高性能伺æœé›»æ©Ÿå‹•æ…‹ç‰¹æ€§ã€æŽ§åˆ¶å™¨æŽ§åˆ¶æ€§èƒ½æ¸¬è©¦çš„完整解決方案。


當å‰é‡å°é›»æ©Ÿçš„性能測é‡ã€è©•ä¼°çš„è¨å‚™ä¸»è¦é‚„是測功機。最åˆæ¸¬åŠŸæ©Ÿåªæ˜¯é‡å°é›»æ©Ÿçš„輸入電壓ã€é›»æµã€è¼¸å‡ºè½‰é€Ÿã€æ‰çŸ©é€²è¡Œæ¸¬é‡ï¼Œè¨ˆç®—出電機的輸入輸出功率和效率。但隨著電機行æ¥çš„é£›é€Ÿç™¼å±•ï¼Œé›»æ©Ÿæ¸¬è©¦é …ç›®è¶Šä¾†è¶Šå¤šï¼Œæ¸¬åŠŸæ©Ÿçš„åŠŸèƒ½ä¹Ÿéš¨ä¹‹è±å¯Œèµ·ä¾†ï¼Œå³ä¾¿å¦‚æ¤ï¼Œé›»æ©Ÿçš„動態測試ä¾ç„¶æ˜¯è¡Œæ¥å…§çš„技術難題。
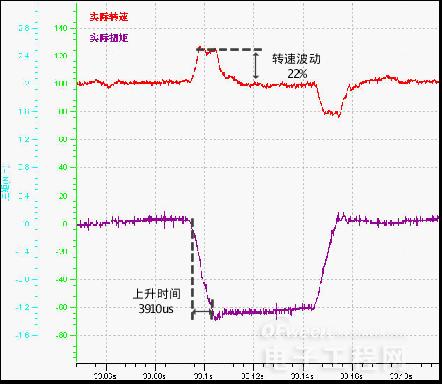
首先動態測試包å«éšŽèºéŸ¿æ‡‰æ¸¬è©¦ï¼Œåˆ†æžè½‰é€Ÿ/è½‰çŸ©æŽ§åˆ¶éŸ¿æ‡‰æ™‚é–“ï¼Œåœ¨é›»æ©Ÿè² è¼‰åœ¨å‡ºç¾éšŽèºè®ŠåŒ–,改變電機的輸出轉速/轉矩時,電機驅動器把電機調節回æ£å¸¸å·¥ä½œç‹€æ…‹ä¸‹æ‰€ç”¨çš„時間長度,通常進å£é«˜æ€§èƒ½ä¼ºæœé›»æ©Ÿè½‰é€ŸéšŽèºéŸ¿æ‡‰æ™‚é–“è¦èƒ½å¤ é”到us級別,轉矩階èºéŸ¿æ‡‰èª¿æ•´æ™‚間也è¦èƒ½å¤ é”到ms級別,以安å·ä¼ºæœé›»æ©ŸSGM7A-10AFA6C這一型號來說,其轉速階èºéŸ¿æ‡‰æ™‚é–“å¯é”790ms,轉矩階èºéŸ¿æ‡‰èª¿æ•´æ™‚é–“é”28msï¼ˆä»¥ä¸Šæ•¸æ“šæ ¹æ“šè‡´é é›»åMPT1000-F電機瞬態控制與測試系統測試çµæžœæ供)。

其次轉速波動測試,考察在轉速控制模å¼ä¸‹ï¼Œè½‰çŸ©çªç„¶ç™¼ç”Ÿè®ŠåŒ–時電機轉速的波動;以åŠè¶…速實驗,檢查電機的安è£è³ªé‡ã€å¯¦é©—轉åå„部分承å—離型力的機械強度和軸承在超速時的機械強度。
動態測試難點一:PID調節緩慢
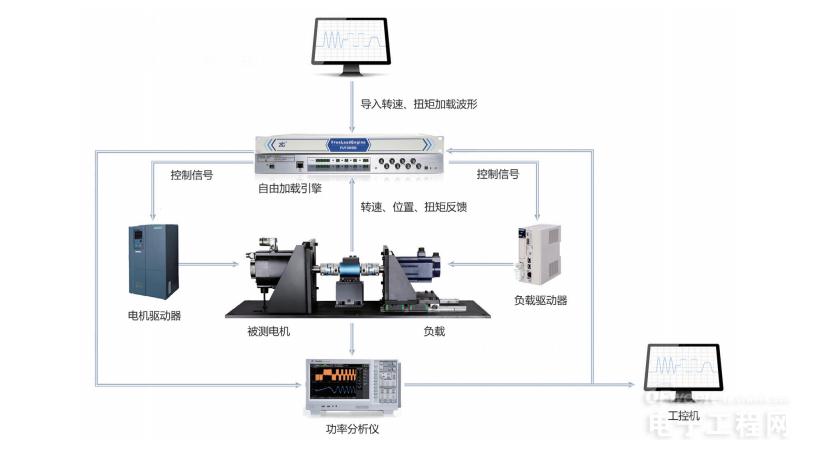
å‚³çµ±æ¸¬åŠŸæ©Ÿåœ¨æ¸¬è©¦èˆ‡åŠ è¼‰éŽç¨‹ä¸æ™®é采用調節PIDä¾†æ”¹è®Šè² è¼‰å¤§å°ï¼ŒåŒæ™‚使用工控機åšåé¥‹æŽ§åˆ¶åˆ¤æ–·å’Œé¡¯ç¤ºï¼Œç”±äºŽé€šä¿¡ç¸½ç·šæ™‚å»¶çš„åŽŸå› å°Žè‡´PIDèª¿ç¯€é€Ÿåº¦ç·©æ…¢ï¼ŒåŠ è¼‰æ¨¡å¼åªèƒ½å¯¦ç¾é€å€‹é»žé€²è¡ŒåŠ 載,如下圖所示:

å°Žè‡´åŠ è¼‰é€Ÿåº¦ç„¡æ³•æé«˜æ›´åŠ ç„¡æ³•å¯¦ç¾ä»»æ„è² è¼‰çš„åŠ è¼‰ï¼ŒåŒæ™‚也由于儀器本身采樣率ã€è½‰é€Ÿæ‰çŸ©é‡‡æ¨£çŽ‡ä½Žä¸‹ï¼Œå¤§å¤§é™åˆ¶äº†å‚³çµ±æ¸¬åŠŸæ©Ÿç„¡æ³•å¯¦ç¾ä¼ºæœç³»çµ±å‹•æ…‹ç‰¹æ€§çš„測試。
動態測試難點二:缺ä¹å°æ¸¬é‡åŽŸç†çš„深入èªè˜å’Œç ”發經驗
傳統集æˆå» 商通éŽå–®ç´”的儀器組åˆä¾†å¯¦ç¾æ¸¬è©¦å¹³è‡ºæ建,由于缺ä¹å°æ¸¬é‡åŽŸç†çš„深入èªè˜å’Œç ”ç™¼ç¶“é©—ï¼Œé›£ä»¥æ ¹æ“šå®¢æˆ¶éœ€æ±‚æ供完善的功能定制æœå‹™ã€‚ç”±æ¤è€Œå±•ç¾å‡ºä¾†çš„å•é¡Œæ—¥ç›Šåš´é‡ï¼Œæ¯”å¦‚åŠ è¼‰ã€æ¸¬è©¦éŸ¿æ‡‰æ…¢ï¼Œåªèƒ½æ‡‰ç”¨äºŽç©©æ…‹æ¸¬è©¦éœ€æ±‚;支æŒä¸‰é€šé“é›»åƒæ•¸æ¸¬é‡åˆ†æžï¼Œç„¡æ³•å¯¦ç¾å°é›»æ©Ÿé©…動器ã€é›»æ©Ÿçš„系統性è¯èª¿æ¸¬è©¦ã€‚
資深公å¸æ†‘借在功率分æžã€é›»æ©Ÿæ¸¬é‡é ˜åŸŸçš„深入ç†è§£ä»¥åŠé•·ä¹…ç©ç´¯ï¼Œçªç ´é›»æ©Ÿå‹•æ…‹æ¸¬è©¦ç“¶é ¸ï¼Œé‡‡ç”¨ç¨å‰µçš„è‡ªç”±åŠ è¼‰å¼•æ“Žå¹¶èžåˆå„€å™¨çš„è¨è¨ˆç†å¿µï¼Œä½¿ç”¨å–®ç¨çš„硬件PID控制器åšè² å饋控制判斷,大幅æ高PID調節速度,推出具有劃時代æ„義的MPTæ··åˆåž‹é›»æ©Ÿæ¸¬è©¦ç³»çµ±ï¼ŒåŒæ™‚滿足行æ¥å°é›»æ©ŸåŠå…¶æŽ§åˆ¶ç³»çµ±çš„穩態與動態的測é‡éœ€æ±‚ï¼Œå¼•é ˜é›»æ©Ÿå¯¦é©—é€²å…¥å‹•æ…‹æ¸¬é‡é ˜åŸŸã€‚
標簽:
![]()
上一篇:ã€å¹²è²¨ã€‘輕æ¾æžæ‡‚輪轂電機/輪...
下一篇:解æžé›»å‹•æ±½è»Šçš„四種驅動電機
ä¸åœ‹å‚³å‹•ç¶²ç‰ˆæ¬Šèˆ‡å…責è²æ˜Žï¼šå‡¡æœ¬ç¶²æ³¨æ˜Ž[來æºï¼šä¸åœ‹å‚³å‹•ç¶²]的所有文å—ã€åœ–片ã€éŸ³è¦–å’Œè¦–é »æ–‡ä»¶ï¼Œç‰ˆæ¬Šå‡ç‚ºä¸åœ‹å‚³å‹•ç¶²(www.hysjfh.com)ç¨å®¶æ‰€æœ‰ã€‚如需轉載請與0755-82949061è¯ç³»ã€‚任何媒體ã€ç¶²ç«™æˆ–å€‹äººè½‰è¼‰ä½¿ç”¨æ™‚é ˆæ³¨æ˜Žä¾†æºâ€œä¸åœ‹å‚³å‹•ç¶²â€ï¼Œé•å者本網將追究其法律責任。
本網轉載并注明其他來æºçš„稿件,å‡ä¾†è‡ªäº’è¯ç¶²æˆ–æ¥å…§æŠ•ç¨¿äººå£«ï¼Œç‰ˆæ¬Šå±¬äºŽåŽŸç‰ˆæ¬Šäººã€‚轉載請ä¿ç•™ç¨¿ä»¶ä¾†æºåŠä½œè€…,ç¦æ¢æ“…自篡改,é•è€…è‡ªè² ç‰ˆæ¬Šæ³•å¾‹è²¬ä»»ã€‚
相關資訊
網站簡介|會員æœå‹™|è¯ç³»æ–¹å¼|幫助信æ¯|版權信æ¯|網站地圖|å‹æƒ…éˆæŽ¥|法律支æŒ|æ„見å饋|sitemap
傳動網-å·¥æ¥è‡ªå‹•åŒ–èˆ‡æ™ºèƒ½åˆ¶é€ çš„å…¨åª’é«”â€œäº’è¯ç¶²+â€å‰µæ–°æœå‹™å¹³è‡º
 網站客æœæœå‹™å’¨è©¢é‡‡è³¼å’¨è©¢åª’é«”åˆä½œ
網站客æœæœå‹™å’¨è©¢é‡‡è³¼å’¨è©¢åª’é«”åˆä½œ
Chuandong.com Copyright ?2005 - 2025 ,All Rights Reserved 深圳市奧美大å”廣告有é™å…¬å¸ 版權所有
ç²µICPå‚™ 14004826號 | 營æ¥åŸ·ç…§è‰æ›¸ | ä¸è‰¯ä¿¡æ¯èˆ‰å ±ä¸å¿ƒ |  粵公網安備 44030402000946號
粵公網安備 44030402000946號















