大衛·漢森(David Hanson)做了一些其他機器人制造者不愿做的事。他創造的機器人能夠模仿真人面部表情和面部動作。這聽上去可能并不是一個新奇的想法,但事實上它的確如此。
絕大多數機器人,雖具有人工智能,可以完成一些類似人類的動作,但是它們的面部表情仍然很呆板。原因之一是,在機器人制造領域,人們普遍認為機器人只是對人的面部表情的模仿。“我完全不贊同這一觀點,我們被逼真的表情和手勢所吸引,”大衛-漢森機器人公司總裁漢森表示。
另一個原因是如何解決制造人工智能驅動運動控制系統的重大技術難題,這個系統基于語音和機器視覺輸入,能可靠地模擬真人面部的48個主要肌肉群。“機器人不只是要會表達,更要學會在恰當的時間作出恰當表達,”漢森說,例如基于眼睛接觸的面部表情,必須在1/3秒內作出反應,這樣看上去才更真實。
漢森之前在羅德島設計學院(Rhode Island School of Design)研究藝術,目前已經獲得了德克薩斯州立大學互動藝術與工程博士學位,其本人表示一直致力于解決“將藝術與工程學相結合方面的問題。
藝術性是顯而易見的。漢森制造的機器人的頭部,可模仿包括艾伯特·愛因斯坦(Albert Einstein)和作家菲利浦·狄克(Philip K. Dick)等著名人物,可以明顯地表現出數以千計的細微、可信的面部表情。“我們中很多人刻意避免將機器人制造的太像真人,但大衛卻與眾不同,因為他太專注于研究人類面部細節,”麻省理工學院(MIT)計算機科學與人工智能實驗室研究員,亞倫·艾德辛格(Aaron Edsinger)如是說。他也是這類機器人的合作制造者之一。
從工程學的角度看,漢森的機器人是對如何創造低功耗、緊湊型運動控制系統的研究。以他的愛因斯坦(Einstein)機器人頭部為例,是由33個伺服馬達和關節組成,僅僅需要6V電源提供10W電力來實現其全部面部動作。所需能量很小,僅需要8節AA電池。據漢森說,其他“富有表情的機器人”,指的不是在主題公園和眾多電影布景中見到的那種“啞巴”無生命仿人形機器人,這種機器人通常都需要3kW的電源供電,而且還要有一個電壓范圍,另外還需要氣流系統或流壓流體存儲器。“在愛因斯坦表情機器人制造之前,具有復雜表情表現能力的機器人都需要輔助系統,”他說。
[ALIGN=CENTER]
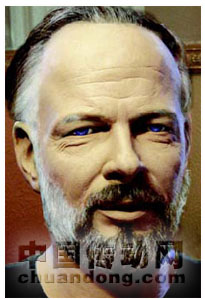
菲利浦·狄克機器人真的很像已故科幻小說家,就連聲音都像。機器人人工智能的個性與他的作品主題相吻合,還有視覺系統和語音識別系統,這保證了機器人可以模仿人類的交談行為——包括人員識別能力,表情觀察,以及進行簡單的對話。[/ALIGN]
同時,如果仿人機器人被納入漢森稱之的“機器人革命”,自我包容就關系到很多的事情。機器人在未來幾年里似乎更有可能融入到我們的日常生活中,國際機器人聯合會公布的2006年世界機器人研究報告中預測,新型家用機器人,包括吸塵器機器人和剪草機器人的數量在2009年將達390萬臺。研究還表示,到2009年將有160萬臺新娛樂休閑機器人進入家庭。
[align=center]

漢森的最知名智能機器人之一是愛因斯坦的頭部,這里放在一個雙足機器人身體上進行展示,身體與頭部不是很契合。
[/align]
漢森希望能夠至少制造出一部分這些新型機器人。到目前為止,他已經將幾臺這類價格昂貴的定制機器人成功銷售給了博物館、娛樂場所、科研實驗室,其中一些價值超過13萬美元。例如,美國宇航局噴氣推進實驗室(NASA‘s Jet Propulsion Lab),就購買了這樣一臺機器人。庫珀-休伊特博物館(Cooper-Hewitt Museum),去年12月也安裝了一臺新版本的愛因斯坦機器人,將其作為美國國家設計三年展(National Design Triennial)的一部分。但是,在未來幾個月,漢森將致力于把這種雙足機器人推向消費市場。
與日本著名機器人制造者高橋智隆(Tomotaka Takahashi)合作,這些新的RoboKind機器人將會有14英寸高,其中機器人身體部分由高橋設計,而頭部則由漢森設計。這些卡通型機器人不僅可以到處走動,而且還具有豐富的面部表情。“雙足機器人在日本并不罕見,有些機器人還能參加足球賽,”漢森說,“但我們的新型機器人將是唯一具有復雜面部表情的機器人。”漢森稱限量版新型機器人售價大約為1萬美元,同時標準模型成本大約3000美元,另將還會有一個簡化版、價值300美元的模型。
所有漢森機器人,無論是用在博物館中或家庭,都有一些關鍵技術。那些引人注目的技術都與漢森的人工智能方法有關——尤其是那些基于會話交流而產生另人難以置信面部表情的方式。菲利浦·狄克機器人甚至由于其人工智能而獲得了美國協會的獎勵。
[align=center]
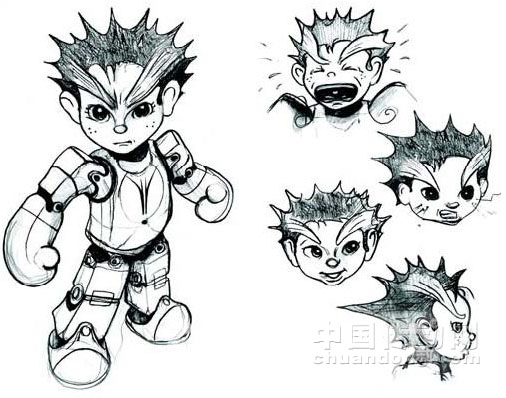
漢森將很快推出一種新的、消費者關注的機器人,這種機器人是與日本的
RoboGarage 公司一起開發的。價格約在3000~10000 美元之間,機器人是一個具有14 英寸高的雙足機器人,具有豐富的面部表情。漢森還計劃推出面部表情動作較少的約300 美元的機器人。這里是漢森早期繪制人物概念草圖之一。[/align]
漢森在機械上的創新給那些需要設計緊湊、高效率運動系統的工程師們提供了一個借鑒。“如果想要把機器人融入到我們生活中,降低機器人能耗就顯得非常重要,”漢森表示,“可惜,在現有驅動技術水平上,降低能耗還沒有更多簡便方法。”但是漢森想出了幾種方法。讓我們來了解這些方法。
皮膚秘密
要了解漢森機器人是如何工作的,最好先了解其皮膚。選擇皮膚材料并不僅僅是為了外表裝飾。漢森發明了“Frubber”,一種具有專利的硅橡膠彈性體,其機械性能影響著每一個機器人全部運動控制系統的設計。
按照漢森的說法,Frubber是一種發泡的、鉑基彈性體,這種彈性體容積中70%是空氣。發泡彈性體在工業中使用很普遍。雖然,使Frubber分離的是漢森所稱之的“孔結構”。他發明了一種特別的加工方法和彈性體化學屬性,這些使得他可以控制發泡的大小、分布、氣囊的形狀、氣泡容積,氣泡容積分布范圍從1微米到幾毫米。漢森說,這樣的尺寸分布允許一定容積泡沫包含有更多的空氣——在相對小的氣泡與相對大的氣泡之間。漢森可以微調氣泡中的空氣量,從而改變Frubber的最終密度。
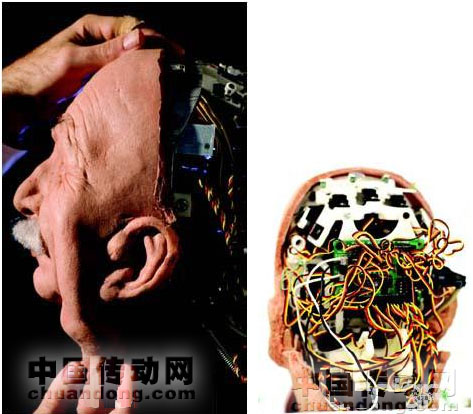
[align=center]
愛因斯坦機器人頭部充滿電線和
馬達。漢森在1 年半前開始研制
第一代愛因斯坦機器人模型,但
從那時起,他已經簡化了機器人
頭部33個侍服馬達的布局,以便
每一個馬達都能夠由一個抽取式
面板進行控制。[/align]
[align=center]
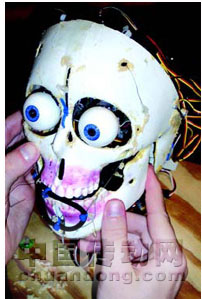
漢森機器人面部采用剛硬頭骨底層,這
不僅能將全部馬達包括進去,還為頭部
內關節提供定位點,以便驅動機器人的
彈性體皮膚。[/align]
這種內有空氣的材料運動時有一點像“人的臉部組織,”漢森說,它不需太大力量就可移動。泡沫型彈性體僅擁有相同體積實體彈性體質量的30%。“所以你就會立刻希望使泡沫型彈性體發生變形只需實體彈性體變形能耗的30%,”漢森說,但實際上它發生變形所需的能量更少,即不到30%。
通過顯微鏡觀察,當彈性體材料拉長時,該材料會呈現出手風琴狀氣囊結構。漢森說在相等拉長下,典型Frubber所需力量是實體所需力量的1/10。同樣,在相同的壓縮尺寸下,Frubber所需的力量是實體所需力量的1/13——當壓力稍高就返回到手風琴狀氣囊的崩潰狀態。漢森說彈性體材料能夠經受數萬次交互循環,其伸長率可能達到900%,盡管該材料的彈性體氣囊壁可能在開始時就損壞了450%。
[align=center]
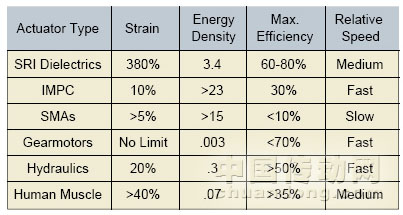
目前還沒有能夠將張力、速度和能量密度聯系在一起來真實模仿人類肌肉的驅動
技術馬達。在更好的驅動器出現之前,漢森已經找到使馬達可以運轉的辦法。[/align]
Frubber僅需要極小的力就能產生形變的特點對于運動系統的其他部位有非常重要的好處。“變形力越少,需要的馬達和聯接就越小,這減少了能量需求,”漢森說。“Frubber使一切成為可能。”
[align=center]
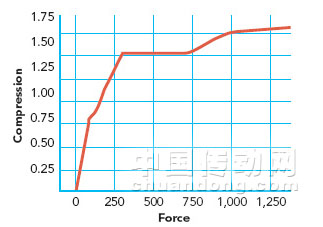
壓縮Frubber只需要一點點力就可以,用一種泡沫硅彈性體做機器人皮膚。
作為回報,低驅動力使漢森可采用小馬達并保持所需動力最小。[/align]
美國宇航局噴氣推進實驗室資深研究科學家、先進技術研究組負責人約瑟夫·巴科恩(Yoseph Bar-Cohen)博士對此也有相同的看法。巴科恩是人造肌肉研究方面的開拓者,他在噴氣推進實驗室的非破壞性評估與推進加速器(NDEAA)上安裝了一個漢森機器人頭。
這些例子顯示出了活動中的類人機器人原型。聚合體創新使得皮膚擁有更好的收縮和聚束情形,同時消耗非常少的電量,采用電池就可使輕量級機器人行走。
大衛·漢森的視頻禮貌
巴科恩計劃以機器人頭為平臺開發各種基于電活性聚合物的人造肌肉,目前仍有一些力量和速度限制。“大衛的機器人需要很少的驅動力和電能,這樣機器人很完美,”他說。“如果說存在針對機器人的人造肌肉的合適測試平臺,那這種機器人就是一個合適平臺。”巴科恩說,雖然他又補充表示,“要真正利用電活性聚合物來驅動機器人,還有一些工作要做。”
驅動
即使采用Frubber有助于減少機器人的驅動力,漢森仍堅持開發出針對每個機器人人工智能軟件輸入量,而作出反應并展示出面部表情的驅動器,這種人工智能軟件是基于語音識別、機器視覺,甚至面部識別的軟件。“我認為面部表情是一個四維雕塑,”漢森說。
在那時維數可能無變化。為什么其他機器人制造者必須考慮在零點幾秒鐘內關閉控制系統?其實,漢森是在不同速度下關閉不同回路,這取決于機器人的任務。“對于人臉識別任務,機器人可能需略加思考,也許需要一秒鐘,并不會看上去不自然,”他說。然而為了保持眼睛接觸,達到象人一樣的速度,控制系統要在20~30ms內關閉。“這大大快于反應時間”,他說。
為了驅動這些機器人,漢森采用了小型伺服馬達——而且相當多。現在版本的愛因斯坦機器人有33個不同的伺服馬達,約有一半的伺服馬達可以模仿臉部肌肉雙向移動。他采用的馬達具有256增量反饋。“雖然沒有納米級精度,”漢森說。“這種方案的33個馬達能提供‘無數種運動可能’“他補充說。漢森通常從HiTec購買現貨馬達。“這些馬達并不是最便宜的,但都有一個很好的性價比;他說,“你可以在任何專賣店內購買到這種馬達。
為了控制機器人頭所有運動,漢森自創了基于PIC的控制器。綜合來自機器人視覺系統和語音識別系統的信息后,控制器發出伺服控制指令。語音識別系統在一個筆記本電腦上操作,并與機器人無線連接。為了弄清楚漢森是如何綜合這些數據的,我們可以考慮一下他的機器人是如何與一群人交流的。機器人可能轉動頭部或盯著人群中的說話者,甚至看上去似乎要與那個說話者交談。在這樣情形下,機器人控制器綜合兩個數據來源,以便判斷出說話者。視覺系統讓電腦“看到”誰的嘴在動。而語音識別系統的立體聲話筒,讓機器人“聽”到聲音發出的方向-——更確切說,漢森監控立體聲信號中的相位差。
識別出說話者只是例子之一。適時地將所有感官數據轉換成幾千種恰當的表情,需要幾千條規則,運算法則,甚至于依賴一個靜態表達數據庫。同時,漢森指出類似人的表情具有多重自由度。例如,機器人能夠同時抬高眉毛和張開嘴來表達“驚訝”。創造出所有控制產生表情的規則同時依賴于“感官科學和自我感知以及軟件工程”,漢森表示。
為了顯示他控制電機的威力并且能將它們安裝在機器人頭骨內,漢森不認為傳統電機是驅動機器人面部運動的理想選擇。事實上,他必須構造一個環形結構去近似模擬真實臉部肌肉運動。“馬達具有人類肌肉所沒有的慣性和振動行為,”他說。漢森通過聯結設計已經成功地克服了這些困難。他經常會增加一些附屬元件而不采用剛性連接,以便他們的行為看上去更自然。但其他時候,他用辮狀尼龍電纜將馬達連接在機器人臉部區域。
不斷地尋找馬達的替代品,漢森密切關注人造肌肉技術。最近,他一直在評估壓電驅動技術,這個項目已經得到國家科學基金會資助。但他表示,相對于現實使用的機器人來說,700美元的驅動器仍然太貴。對于未來機器人驅動器,他將希望放在了基于電活性聚合物的人造肌肉上。“尤其是當你能將這些肌肉注進皮膚里時,將消除繁雜的機械機構”他說。
下一篇:
?
安捷倫科技推出行業領先的L2-7在N2X多重服務測試方案?
安捷倫科技推出行業領先的L2-7在N2X多重服務測試方案上與基于硬件的TCP集成

































 網站客服
網站客服 粵公網安備 44030402000946號
粵公網安備 44030402000946號