


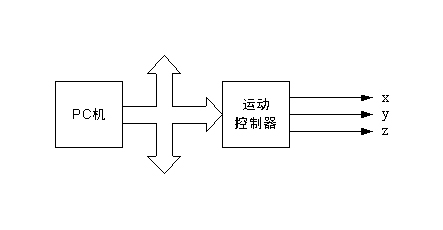
圖1
·基于以太網的運動控制器
運動控制技術與網絡技術相結合,在國內研究還處于起步階段。網絡技術的引入使大范圍的運動協調控制成為可能,便于實現集中的分布式控制,便于將運動控制系統集成至車間、廠級ERP,使系統更加有效工作。
需要研究的問題是網絡環境下驅動控制關鍵技術,如高速、高精伺服實現,多軸伺服參數自調整絕對同步的實現。需要解決包括變傳輸周期、網絡誘導時延、數據包丟失、同步等關鍵技術。
2、運動控制器的功能
·運動軌跡規劃功能。能接收上位機來的指令,通過運算形成實際運動的位置、速度跟蹤,加速度跟蹤以及限制的方法以優化動態過程;
·軟件上配備有完善的伺服控制功能;
·完善的運動軌跡插補功能;
·電子齒輪輸入、輸出功能和方便與機床和機器人等設備聯接的接口設備;
·能迅速建立高層應用程序與機床或其他設備之間的控制及測試數據交換;
·伺服控制策略。智能控制、參數辨識以實現柔性伺服。
基于DSP+FPGA的開放式伺服與主軸統一控制平臺研發
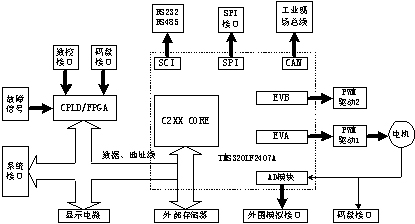
圖2 平臺結構框圖
·平臺的特點
–伺服與主軸硬件一體化設計
–控制方案:DC有刷電機、DC無刷電機、AC無刷電機(PMSM)、AC感應電機
–通信通道:RS232/RS485、CAN、并行I/O
–柔性結構可以實現位置控制、速度控制和力矩控制
·基于平臺的大容量高速主軸伺服控制開發
–針對中大容量高速主軸解決制動能量吸收及實現技術,這是主軸伺服大容量化和系列化的關鍵技術。
–實現方案有兩種:其一是AC/DC、DC/AC解耦控制。其二是CIS整流/逆變一體化控制。
–基本出發點,以能量平衡為出發點,即用多少取多少,減少存儲,以此為基礎把逆變器電機部分(VSIM)看作直流電源即整流器(VSM)的負載,設計控制規律,使電網輸入功率 跟隨負載功率 變化,達到用需平衡。
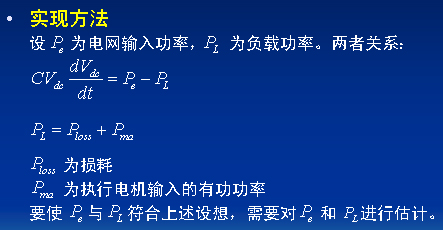
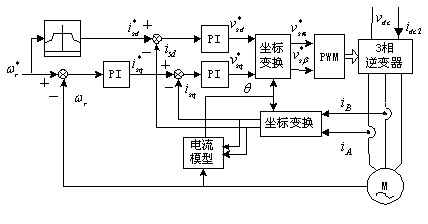
圖3 異步電機矢量控制系統結構
根據 Akagi 瞬時無功功率理論,設 為電機輸入有功功率
為電機輸入有功功率 和損耗功率
和損耗功率 之和,則依圖3有
之和,則依圖3有
 根據同步旋轉坐標系下的VSIM模型和定義瞬時無功功率 可以導出逆變電機部分的輸入功率的迭代形式
根據同步旋轉坐標系下的VSIM模型和定義瞬時無功功率 可以導出逆變電機部分的輸入功率的迭代形式

圖4 VSR控制結構圖
在同步旋轉坐標系下,電網輸入到VSR的瞬時有功功率采用電壓、電流雙閉環控制時,可以表示為
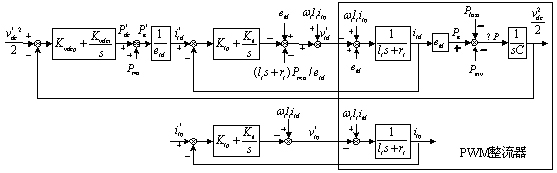
圖5 補償法的一種實現
基于以太網的運動控制器
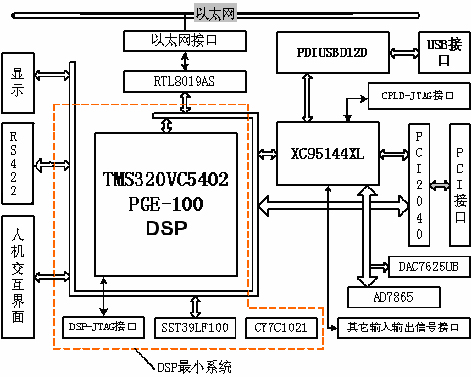
圖6 基于以太網的運動控制器結構圖
·子功能模塊
–DSP最小系統模塊
由DSP本身以及晶體振蕩器、復位電路、譯碼電路等組成
–以太網接口模塊
充分利用DSP的有限資源,實現了簡化的TCP/IP協議棧
–PCI接口模塊
采用專用橋接芯片PCI2040,可提供與DSP的無縫聯接。實現了Windows、VxWorks下的驅動支持
–USB接口模塊
作為PCI接口的補充,必要時可采用雙通訊機制
–RS422收發模塊
可滿足遠程要求的串口通訊模塊
–模擬量、脈沖量和開關量的接口模塊
通過CPLD編程實現邏輯和信息/能量轉換
–人機交互接口模塊
液晶顯示、鍵盤等
·功能特點
–高速實時信息接口,能接收多路傳感器信號,并具有信息融合功能;
–實時與網絡交換信息;
–信息/能量接口,綜合處理多傳感器信息及網絡信息,給出各隨動系統最優運動軌跡指令。
結束語
當前,運動控制技術已呈現出數字化、網絡化的發展勢頭,許多極具前瞻性的研究工作正在開展。較之以往,其涉及的內容和范圍都將更為廣泛。由于精力有限,報告中難免存在疏漏,歡迎大家批評指正!
華中科技大學 萬淑蕓 姜向龍 胡嬋娟 萬宇賓






























 網站客服
網站客服 粵公網安備 44030402000946號
粵公網安備 44030402000946號