時間:2024-03-04 16:48:45來源:控制工程中文版
運動控制涉及使用電機對執行器進行定位和精確移動。雖然運動控制并不總是閉環控制,但它不同于電機控制,后者的主要目標是實現并驗證已知位置或運動。
01
步進電機的原理和維護
步進電機是一種無刷直流電機,其定子由多個電磁鐵圍繞齒輪狀轉子排列而成。環形排列的磁體被分為不同的組,這就是相。每相同時通電,使電機“步進”到下一個位置。
基于微控制器的步進驅動器按適當的順序激活驅動晶體管。典型的步進電機分辨率為每轉200步,但使用“微步進”驅動器,可以實現每轉1600步。步進驅動器有時也被稱為“斬波器”。
步進電機通常在沒有反饋設備(如編碼器或解碼器)的情況下運行,這使它們成為一種比伺服電機更便宜的定位方法,但它們也沒有太多的保持扭矩。除了電機和驅動器外,還需要分度器。它可內置在驅動器中,并與主控制器通信,或由可編程邏輯控制器 (PLC) 等控制器發送脈沖,對驅動器進行分度。步進系統的故障排除可能包括檢查控制電路中的電壓和通信,甚至使用示波器查看脈沖信號。
02
伺服系統的組件和維護
伺服或伺服機構是一種使用反饋來控制位置和扭矩的裝置。它們可以是電動、液壓或氣動的,但在工業自動化中使用的大多數伺服系統都是電機驅動的。
伺服電機可以是有刷永磁直流電機、無刷永磁交流電機或交流感應電機。它們通常內置一個編碼器或解析器。它們還經常與齒輪頭集成在一起。電機組件上有兩個電纜接頭,這樣就可以分別傳輸來自編碼器/傳感器(反饋電纜)的信號與電機電源。
伺服驅動器接受來自編碼器的脈沖輸入,并通過電流監測扭矩。溫度傳感器和制動器控制信號有時包含在控制電纜中。一般情況下,伺服驅動器比變頻器更復雜,并且通常內置邏輯功能。現代控制器幾乎總是配置高速通信端口,可以與其它控制器連接以協調運動。通常這是一種基于以太網的通信協議,但有時也會使用光纖。
伺服控制算法基于PID的位置或轉矩控制。電機需要根據電機和負載特性進行調整,以確保實現最佳性能。正是出于這個原因,來自同一制造商的電機和驅動器通常配套出售和使用。有些電機內置了驅動器和控制器。這些“集成伺服”電機,可以聯網來執行復雜任務或作為獨立的定位器來使用。
伺服電機和由變頻器控制的典型交流感應電機之間的一個重要區別,是伺服電機在零速度下具有保持轉矩。如果電機軸在控制電源下偏離其位置,它會嘗試自我校正,如果沒有達到預設位置,則會導致控制器故障。
協調運動時,通常使用“主”控制器或位置來調整其它控制器的速度。一個軸的運動取決于另一個軸或虛擬軸的位置變化。有一點很重要, 那就是使用專用于運動系統的快速通信網絡。可以使用專用的運動控制器來協調伺服軸。通過集成機器視覺,將機械手引導到正確的位置。運動控制器可以集成到PLC機架中,或者是作為單獨系統使用。很多都有單獨的I/O模塊,可以使用IEC 61131 PLC語言進行編程。
對伺服系統進行故障排除,除了典型的電氣診斷方法,通常還需要了解平臺軟件。驅動器和控制器通常具有內置的診斷功能,以檢測電機及其所連接負載可能出現的問題。聯軸器等機械元件也會出現故障。總之,請先閱讀您的文檔。
03
機器人運動控制的路徑感知
工業機器人用于生產制造和材料搬運任務,其物理配置取決于所需的功能。有效載荷和速度要求有助于確定在特定應用中所使用的機器類型。
機器人可以有多達 6-7 個運動軸,也可以只有 3 個運動軸。要到達 X-Y 平面上的任意點,需要兩個運動軸;要到達 X-Y-Z 空間中的任意點,需要三個運動軸。要完全控制 "手臂 "末端的工具位置,除了 X、Y 和 Z 軸外,還需要另外三個軸,即俯仰軸、滾動軸和偏航軸。
圖3展示了在三維空間中到達任何點和方向所需的6個軸,但機器人使用不同的坐標系,關節配置也可能不同。原點和方向也隨品牌的不同而有不同的定義,通常可以在軟件中進行更改。
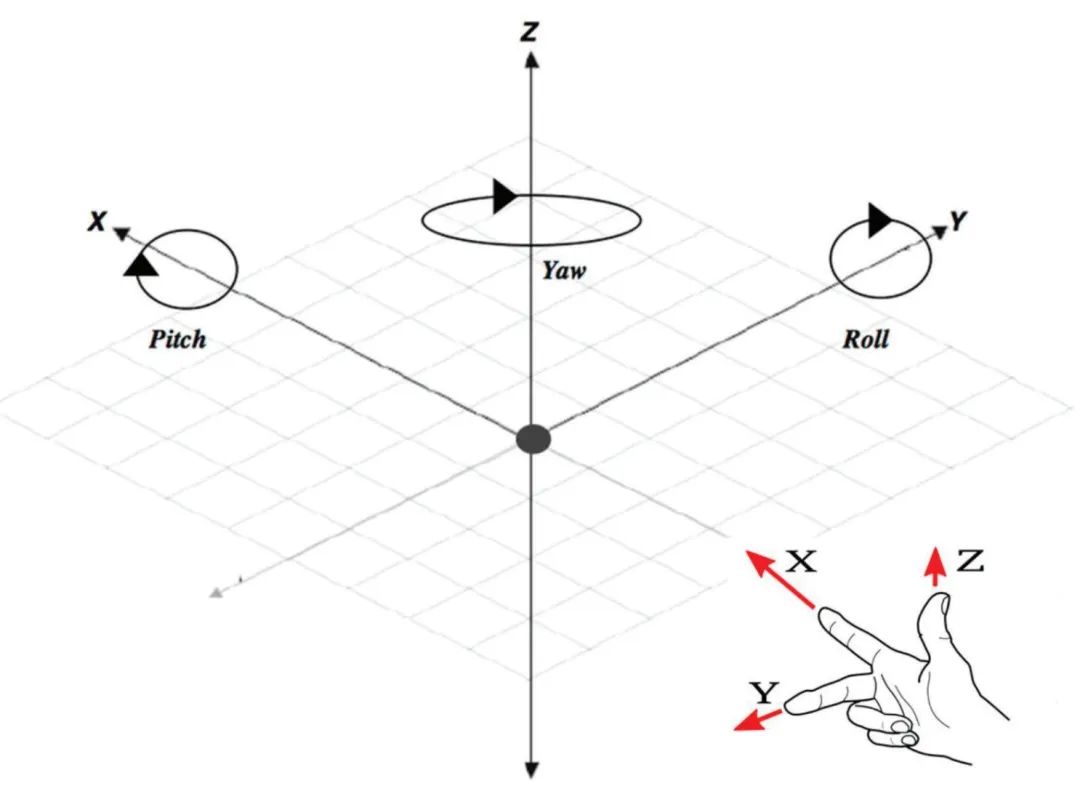
▲機器人坐標軸和右手法則。
X、Y和Z位置被稱為笛卡爾坐標,但它們可以從不同的參考點定義。如果從機器人的底部或環境參考點來定義,則被稱為世界坐標。在這種情況下,原點參考系是靜止的。從執行器的角度進行尋址時,則被稱為工具坐標,原點隨終端執行器一起移動。這也可包括從工具連接點到工具接觸零件的偏移。也可以定義局部坐標,通常將原點設置在工作區域內。這允許為托盤或其它就地系統復制參考點。
單個關節也可以獨立控制,通常以度為單位進行定義。距離通常以公制單位(mm)定義,但也可以在軟件中按用戶定義的單位進行縮放。除了X、Y和Z之外,滾轉、俯仰和偏航還可以用其它字母進行定義,如U、V和W。
機器人能夠到達的區域被稱為工作范圍。可以在機箱內定義平面和空間,以防止碰撞或確保安全,也可以將光幕等安全設備集成到機器人工作單元中。
機器人控制器不斷進行計算,以確保它們知道機器人相對于參考點和路徑的位置。當沿著定義路徑移動時,軸必須協同工作,因此機器人是協調運動控制的最終形式。這就是為什么控制器通常用于支持實現和保持位置的任務。
與機器人打交道時需要理解的一個重要問題是奇點。在這種情況下,由于物理或數學約束,機器人無法沿特定路徑移動其終端執行器。機器人最終可能會處于無法繞特定點旋轉工具的位置,這有時被稱為萬向節鎖定。在其它物理配置中,通過某些方向移動關節可能會損壞相關的電纜或軟管,因此當移動機器人靠近奇點或旋轉軸過遠時需要小心。通常有多個關節配置,可以實現相同的工具位置和方向,這通常被稱為冗余自由度。
機器人控制器通常能夠執行邏輯功能和操作外部設備,但它們通常內置在工作單元中,并連接到“主”控制器,如PLC。控制器可以是通過電源和信號電纜連接到機器人單元,也可以內置在機器人底座中。連接可以是24 Vdc的物理連接、通信鏈路或通過內部路由到終端執行器或工具的“直通”端口和連接器。直通端口通常包括氣動軟管。機器人可以根據其物理配置進行分類。圖4展示了工業應用中常見的一些機器人。
6軸鉸接臂在重型有效載荷應用中比較常見,而4軸SCARA通常用于定向拾取和放置。Delta配置非常快,經常在電子行業中用于元件放置。另外一個需要注意的術語是協作機器人(Cobot):是為在共享空間內直接與人類進行互動而設計的,與此處所示的配置并不相同。
04
讓機器人編程更容易
機器人可以使用計算機或通過示教器進行編程。需要對兩類代碼進行編程:程序和位置數據。為了執行從一個位置移動到另一個位置的任務,機器人終端執行器首先需要定義起點和終點,然后需要編寫如何到達那里的程序。這可能涉及額外位置,還需要外部信號來告訴機器人物體存在或開始移動。
可以通過在軟件中列出來定義位置,但使用示教器更容易。示教器允許操作員移動各個軸,將機器人“驅動”到所需位置。為滿足精度和安全要求,一般為低速。在操縱機器人時,還需要按下一個3位“死區開關”。彈簧加載開關需要保持在中間位置,如果一直按下或釋放,機器人將無法移動。
程序是對不同位置的一系列移動。它們可以單獨觸發,也可以鏈接在一起。機器人技術中使用的語言多種多樣,通常為制造商專有。它們通常類似于Basic或Assembly之類的語言,帶有JUMP和MOVE語句。也可以使用其它高級腳本語言,來構建數據結構或創建數學算法,例如計算路徑或位置。一些語言允許并行處理,允許機器人一次執行多個動作,例如在相機跟蹤移動對象時計算移動向量。
位置數據表和編程過程位于不同的內存區域,因此可以在不影響另一個的情況下更改其中一個。這允許通過計算機或示教器編輯表格,來變更或“修改”位置。位置通常是在世界坐標中定義的,但6軸機器人的各個軸的位置可能會因終端執行器的工具處于相同位置而有所不同。可以通過將機器人驅動到具有特定軸配置的位置并選擇“示教”或使用“引導”的技術來示教位置。該技術允許用戶在軸放松狀態下手動將軸推到一系列特定位置,從而描述路徑。
05
機器人故障排除和維護的注意事項
機器人故障排除和維護包括使用軟件或示教器來調整(微校正)位置,更換終端執行器上的工具,并維護電氣或氣動連接。與運動控制器和變頻器一樣,機器人控制器通過提供故障數據來指示系統出現的問題。大多數故障都會導致機器人停止移動,并可能要求操作員在糾正故障后將機器人移動到“安全”位置。
機器人工作單元與機器人接口通常帶有PLC和HMI。PLC與機器人通信,在HMI上顯示接收到的故障代碼和其它數據。這涉及兩個通信鏈路(機器人PLC和PLC-HMI),因此確保它們正常工作非常重要。
終端執行器可能具有M8或M12電纜連接、帶端子的接線盒、ASI(執行器傳感器接口)或以太網遠程I/O等通信接口。如果傳感器終端配置蓋子,那么事先知道通信接口的類型可能會有所幫助。檢查文檔或檢查夾具或工具區域以查看這些連接。
顯示了機器人工作單元的典型布局。線條的不同顏色表明,不同元件之間的連接可以是離散布線、通信、氣動,或者在機器人與控制器連接的情況下是電源和反饋布線的組合。這可能會使故障排除變得復雜,因為處理機械、電氣和控制專業,所需知識的范圍廣泛。
在這些系統中,通常存在不受機器人控制器控制的執行器,例如工件夾具中。這需要PLC和機器人控制器發出“握手”信號。用于材料處理和輸送系統的外部系統也可以與PLC接口,并且還可以存在多個機器人。防止多個機器人和工具之間的碰撞可能非常復雜。安全裝置,如光幕、地板掃描儀和門開關,可以與機器人控制器和PLC接口。也可以使用機器視覺為機器人定位零件,從而將系統的復雜性引入另一個層次。
下一篇:煤礦機器人的功能和特點有哪些?
中國傳動網版權與免責聲明:凡本網注明[來源:中國傳動網]的所有文字、圖片、音視和視頻文件,版權均為中國傳動網(www.hysjfh.com)獨家所有。如需轉載請與0755-82949061聯系。任何媒體、網站或個人轉載使用時須注明來源“中國傳動網”,違反者本網將追究其法律責任。
本網轉載并注明其他來源的稿件,均來自互聯網或業內投稿人士,版權屬于原版權人。轉載請保留稿件來源及作者,禁止擅自篡改,違者自負版權法律責任。
產品新聞
更多>
2025-06-16

2025-06-09

2025-06-06

2025-05-19

2025-04-30

2025-04-11












 網站客服
網站客服 粵公網安備 44030402000946號
粵公網安備 44030402000946號