時(shí)間:2024-01-11 17:10:13來源:全球技術(shù)地圖
同時(shí),在人工智能技術(shù)賦能下,特種機(jī)器人功能更加強(qiáng)大。未來,特種機(jī)器人在太空探索、軍事偵察、緊急救援等領(lǐng)域的應(yīng)用將更為廣泛,更好地滿足各領(lǐng)域任務(wù)需求。
一、特種機(jī)器人的定義與分類
特種機(jī)器人,又稱為專用服務(wù)機(jī)器人,屬于服務(wù)機(jī)器人的一種。根據(jù)國際機(jī)器人聯(lián)合會(huì)(International Federation of Robotics,IFR)的定義,服務(wù)機(jī)器人是一種半自主或全自主工作的機(jī)器人(不包括從事生產(chǎn)的設(shè)備),它能完成有益于人類的服務(wù)工作。服務(wù)機(jī)器人可分為專用服務(wù)機(jī)器人和家用服務(wù)機(jī)器人兩類。其中,專用服務(wù)機(jī)器人是在特殊環(huán)境下作業(yè)的機(jī)器人,又稱特種機(jī)器人,如水下作業(yè)機(jī)器人、空間探測機(jī)器人、搶險(xiǎn)救援機(jī)器人、反恐防暴機(jī)器人、軍用機(jī)器人、農(nóng)業(yè)機(jī)器人、醫(yī)療機(jī)器人及其他特殊用途機(jī)器人;而家用服務(wù)機(jī)器人是服務(wù)于人的機(jī)器人,如清潔機(jī)器人、康復(fù)機(jī)器人等。
特種機(jī)器人的早期研究集中在軍事領(lǐng)域。二戰(zhàn)期間首次出現(xiàn)了用于軍事目的的遙控機(jī)器人。德軍制造的“歌利亞”遙控炸彈被認(rèn)為是現(xiàn)代遙控軍用機(jī)器人的鼻祖,這一時(shí)期的機(jī)器人主要用于地雷探測和拆除,以及軍事偵察任務(wù)等。隨著科技的不斷發(fā)展,特種機(jī)器人逐漸開始在民用領(lǐng)域得到廣泛應(yīng)用。例如,水下作業(yè)機(jī)器人可在人類難以到達(dá)的水下完成維修和勘察任務(wù),大幅提高了人類的工作效率。
特種機(jī)器人的分類較為復(fù)雜,根據(jù)不同的要素可有不同的分類方法。本文按照特種機(jī)器人使用的空間(陸域、水域、空中、太空、多空間)進(jìn)行分類描述,對(duì)特種機(jī)器人的最新研究成果加以介紹分析。
二、研究現(xiàn)狀
伴隨著科技的發(fā)展和需求的增長,特種機(jī)器人應(yīng)用領(lǐng)域繼續(xù)增加,不論是在陸地、海洋還是太空中,都有新式特種機(jī)器人的身影。
(一)陸域機(jī)器人
(1)可自毀的偵察機(jī)器人
2023年8月,韓國首爾國立大學(xué)研究人員開發(fā)出一款可以自毀并不留任何痕跡的機(jī)器人。這種機(jī)器人由一種柔性硅樹脂材料制成,當(dāng)暴露在紫外線下時(shí),該樹脂會(huì)釋放氟離子,加熱材料并使其迅速降解,只留下油狀液體。該機(jī)器人還配備了溫度傳感器陣列、應(yīng)變傳感器和光電探測器陣列,通過溫度傳感器和光電探測器監(jiān)測狀況來確定何時(shí)觸發(fā)機(jī)器人的自毀。這項(xiàng)技術(shù)可以確保機(jī)器人在執(zhí)行監(jiān)視、偵察和運(yùn)輸任務(wù)時(shí),攜帶的敏感數(shù)據(jù)不會(huì)被敵方或未經(jīng)授權(quán)的人訪問。一旦任務(wù)完成或被敵人發(fā)現(xiàn)時(shí),操作員可以觸發(fā)內(nèi)置的紫外LED,使機(jī)器人在不到兩小時(shí)內(nèi)自行分解成無法恢復(fù)的形式。此外,這些機(jī)器人還可以用于在危險(xiǎn)區(qū)域執(zhí)行搜索任務(wù)等,具有廣泛應(yīng)用空間。
(2)多功能偵察機(jī)器人
2023年12月,俄羅斯赫魯廖夫大將物資技術(shù)保障軍事科學(xué)院的研究人員開發(fā)出一款多功能機(jī)器人,能夠執(zhí)行技術(shù)偵察技術(shù)、排雷、撤離傷員、發(fā)射無人機(jī)以及對(duì)其充電。這是一種輕型無人駕駛平臺(tái),采用Kevlar機(jī)身,配備機(jī)械手、PKT機(jī)槍、煙幕系統(tǒng)、帶有可伸縮發(fā)射平臺(tái)和充電裝置,位置發(fā)射器和地雷探測系統(tǒng)。機(jī)器人的主要功能包括偵察武器和地形、維修工作和疏散傷員。無人機(jī)降落在機(jī)器人上后,通過連接位于平臺(tái)底部和無人機(jī)腿部的磁性觸點(diǎn),為無人機(jī)電池充電。因此,本發(fā)明可以簡化設(shè)計(jì)并提高技術(shù)智能機(jī)器人的可靠性,提供探測地雷和其他爆炸裝置的能力,實(shí)現(xiàn)雙工通信和為無人機(jī)充電。
(二)水域機(jī)器人
(1)多功能水下探測機(jī)器人“Jellyfish-Bot”
2023年4月,德國馬克斯普朗克智能系統(tǒng)研究所(MPI-IS)的科學(xué)家受水母啟發(fā),開發(fā)出一個(gè)多功能水下機(jī)器人——Jellyfish-Bot。Jellyfish-Bot體積小、節(jié)能且?guī)缀跬耆o音。它采用電動(dòng)液壓致動(dòng)器作為人工肌肉,通過電流驅(qū)動(dòng)機(jī)器人,同時(shí)具備空氣墊和防水組件以提供穩(wěn)定性。這一設(shè)計(jì)使得機(jī)器人能夠優(yōu)雅迅速地游動(dòng),動(dòng)作看起來像真正的水母。
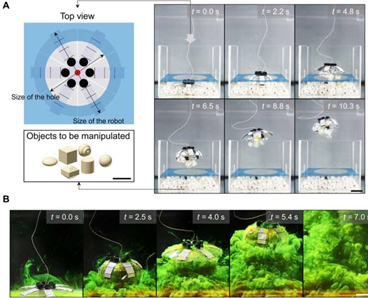
圖1:多功能水下探測機(jī)器人“Jellyfish-Bot”
Jellyfish-Bot具有廣泛的應(yīng)用潛力,特別是在清理海洋垃圾方面。它可以在復(fù)雜的海洋環(huán)境中搜尋和搬運(yùn)垃圾、收集脆弱的生物樣本,如魚卵等。此外,Jellyfish-Bot幾乎無聲地運(yùn)行,不會(huì)對(duì)周圍環(huán)境產(chǎn)生負(fù)面影響,從而使其能夠與水生物種溫和地互動(dòng),成為海洋生物學(xué)研究的理想助手。Jellyfish-Bot代表了水下機(jī)器人技術(shù)領(lǐng)域的一項(xiàng)革命性創(chuàng)新,為應(yīng)對(duì)海洋塑料污染等全球環(huán)境問題提供了新的解決方案。
(2)仿“螳螂蝦”機(jī)器人
2023年11月,中國浙江理工大學(xué)和英國埃塞克斯大學(xué)(University of Essex)的研究人員合作開發(fā)出一款仿生機(jī)器人,靈感來自蝦螳螂蝦,旨在探索和監(jiān)測水下狹窄環(huán)境。該機(jī)器人結(jié)構(gòu)參考生物螳螂蝦,采用扁平身體和流線型尾叉設(shè)計(jì),有效減小水流阻力。剛?cè)狁詈显O(shè)計(jì)降低水對(duì)機(jī)器人的影響,提高在水下運(yùn)動(dòng)中的穩(wěn)定性。該機(jī)器人由5對(duì)人工腹足和柔軟的身體組成,通過調(diào)整腹足的運(yùn)動(dòng)頻率、振幅和相位差,實(shí)現(xiàn)速度和穩(wěn)定性的平衡。經(jīng)過原型測試,機(jī)器人在水下表現(xiàn)出色,最大速度達(dá)到0.28米/秒,最小轉(zhuǎn)彎半徑為0.36米,展現(xiàn)了在狹窄和復(fù)雜水下環(huán)境中進(jìn)行探索任務(wù)的潛力。研究團(tuán)隊(duì)計(jì)劃進(jìn)一步優(yōu)化機(jī)器人的結(jié)構(gòu)、形狀和硬件系統(tǒng)設(shè)計(jì),實(shí)現(xiàn)在狹窄水下環(huán)境中的自主移動(dòng),并增加信息獲取設(shè)備,以更精確地實(shí)現(xiàn)閉環(huán)運(yùn)動(dòng)控制。未來希望將該技術(shù)應(yīng)用于海洋環(huán)境的監(jiān)測和救援。
(三)空中機(jī)器人
(1)能夠在受損后恢復(fù)飛行功能的昆蟲級(jí)機(jī)器人
2023年3月,美國麻省理工學(xué)院的研究人員開發(fā)出具有彈性的“人造肌肉”,可以讓昆蟲級(jí)大小的空中機(jī)器人在遭受嚴(yán)重?fù)p傷后有效恢復(fù)飛行性能。實(shí)驗(yàn)顯示,這種昆蟲機(jī)器人在被10根針扎穿或一側(cè)翅膀被剪掉20%的情況下仍能飛行。研究人員使用一種名為“介電彈性體制動(dòng)器”的柔性材料作為“人造肌肉”,它能將電能轉(zhuǎn)化為機(jī)械能,為昆蟲機(jī)器人兩側(cè)的翅膀提供動(dòng)力。最關(guān)鍵的是,這種“人造肌肉”材料有一種故障自清除機(jī)制,能斷開電極與微小損傷部位的連接,讓裝置繼續(xù)運(yùn)作。對(duì)于較大的損傷,研究人員開發(fā)出一種激光修復(fù)技術(shù),能讓以往必須報(bào)廢的昆蟲機(jī)器人重新投入使用。據(jù)評(píng)估,過去需要報(bào)廢的機(jī)器昆蟲經(jīng)過修復(fù)后,可恢復(fù)87%的飛行能力。研究人員表示,這種機(jī)器人具有很高的魯棒性和適應(yīng)性,可以用于各種任務(wù),如環(huán)境監(jiān)測、災(zāi)難救援、生物學(xué)觀察等。
(2)可全方位穩(wěn)定飛行的“蜜蜂”機(jī)器人
2023年5月,美國華盛頓州立大學(xué)的研究人員開發(fā)出一種可在各個(gè)方向穩(wěn)定飛行的蜜蜂機(jī)器人(Bee++)。這款Bee++原型機(jī)重量為95毫克,翼展為33毫米,比重約10毫克的真正蜜蜂大,但它完全實(shí)現(xiàn)了典型飛行昆蟲所展示的六度自由運(yùn)動(dòng)。Bee++擁有4個(gè)由碳纖維和聚酯薄膜制成的機(jī)翼,以及4個(gè)控制機(jī)翼的輕型驅(qū)動(dòng)器,一次可實(shí)現(xiàn)自主飛行5分鐘,是全球首款能夠在各個(gè)方向穩(wěn)定飛行的原型機(jī)。該研究團(tuán)隊(duì)在2019年首次制造出一個(gè)質(zhì)輕到可以起飛的四翼機(jī)器人,但很難控制其復(fù)雜的偏航運(yùn)動(dòng)。為了解決這個(gè)問題,研究人員從昆蟲身上得到啟發(fā),改進(jìn)了機(jī)器人的物理設(shè)計(jì),并發(fā)明了新的控制器。研究人員調(diào)整了機(jī)器人的翅膀,使其在一個(gè)傾斜的平面內(nèi)拍打,還將機(jī)器人每秒拍打翅膀的次數(shù)從每秒100次增加到160次。這種機(jī)器人可用于人工授粉、狹小空間內(nèi)的搜救、各種環(huán)境中的生物研究或環(huán)境監(jiān)測等多項(xiàng)應(yīng)用。
(四)太空機(jī)器人
(1)外星生物生命探測器(EELS)
2023年5月,美國國家航空航天局(NASA)噴氣推進(jìn)實(shí)驗(yàn)室(JPL)對(duì)用于穿越極端地形的蛇形機(jī)器人進(jìn)行了測試。該機(jī)器人被稱為“外星生物現(xiàn)存生命探測器”(Exobiology Extant Life Surveyor,EELS),重100千克,長4米,由10個(gè)可以旋轉(zhuǎn)的相同組件構(gòu)成,使用螺紋進(jìn)行推進(jìn)、牽引和抓握。EELS蛇形機(jī)器人能夠自主繪制地圖、穿越和探索以前無法到達(dá)的目的地,而無須人類實(shí)時(shí)操作。其目標(biāo)之一是尋找可能隱藏在“土衛(wèi)二”冰殼下的生命跡象。據(jù)現(xiàn)有資料顯示,EELS具有許多突破性超強(qiáng)功能,主要表現(xiàn)在:一方面該機(jī)器人具有高度適應(yīng)性。EELS已經(jīng)在沙地、雪地和冰雪環(huán)境中進(jìn)行了測試,表現(xiàn)出高度的適應(yīng)性。它可以在地球、月球和更遠(yuǎn)的地方選擇出安全的運(yùn)行路線,包括連綿起伏的沙地和冰地、懸崖峭壁、對(duì)漫游車來說過于陡峭的隕石坑、地下熔巖管道和冰川內(nèi)部空間。另一方面該機(jī)器人具有高度自主性。由于地球和深空之間存在通信滯后,EELS被設(shè)計(jì)成一種能自主感知所處環(huán)境、計(jì)算風(fēng)險(xiǎn)、行進(jìn)的機(jī)器人。
(2)探索火星的類蜥蜴機(jī)器人
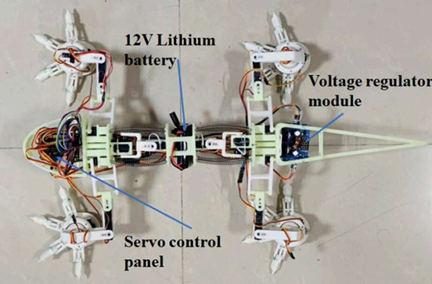
圖:探索火星的類蜥蜴機(jī)器人
2023年2月,中國南京航空航天大學(xué)的研究人員開發(fā)出一種新的以蜥蜴為靈感的四足機(jī)器人,以幫助探索火星。該機(jī)器人具有靈活的身體結(jié)構(gòu),可以復(fù)制沙漠蜥蜴的動(dòng)作和運(yùn)動(dòng)方式,從而能夠克服在軟土上移動(dòng)和攀爬巖石等難題。研究人員創(chuàng)建了一系列運(yùn)動(dòng)學(xué)模型來確定機(jī)器人的運(yùn)動(dòng),并在模擬和原型測試中對(duì)其進(jìn)行評(píng)估。該團(tuán)隊(duì)目前正在研究機(jī)器學(xué)習(xí)模型,以使機(jī)器人的動(dòng)作適應(yīng)不同的地形,并計(jì)劃添加一個(gè)持續(xù)供電系統(tǒng)。
(五)多空間機(jī)器人
2023年3月,美國卡內(nèi)基梅隆大學(xué)(Carnegie Mellon University)的研究人員開發(fā)出一種可以在不同的環(huán)境條件下改變自己的形狀和運(yùn)動(dòng)方式的新型軟體機(jī)器人,可實(shí)現(xiàn)快速從陸地轉(zhuǎn)移到海洋,無需重新配置。
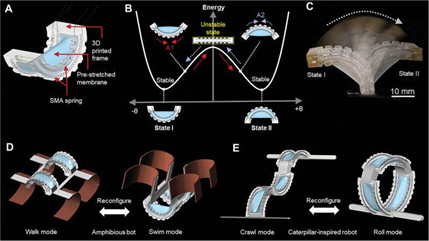
圖4:可在陸地和水中自適應(yīng)運(yùn)動(dòng)的軟體機(jī)器人
該軟體機(jī)器人約為手機(jī)大小,由兩個(gè)雙穩(wěn)態(tài)執(zhí)行器組成,四個(gè)角上各安裝了一個(gè)彎曲的執(zhí)行器。其中雙穩(wěn)態(tài)執(zhí)行器是實(shí)現(xiàn)從步行狀態(tài)無縫切換到爬行、跳躍和游泳狀態(tài)的主要部件。該雙穩(wěn)態(tài)執(zhí)行器由包含形狀記憶合金彈簧的3D打印軟橡膠制成,彈簧可根據(jù)電流做出收縮反應(yīng),從而導(dǎo)致制動(dòng)器彎曲。在陸地上時(shí),四個(gè)彎曲的執(zhí)行器可以充當(dāng)腿來行走。在水中時(shí),雙穩(wěn)態(tài)執(zhí)行器會(huì)改變機(jī)器人的形狀,將彎曲的執(zhí)行器置于可充當(dāng)螺旋槳的理想位置,完成游泳動(dòng)作。研究人員稱,該軟體機(jī)器人具有很高的靈活性和適應(yīng)性,可以應(yīng)用于多種場景,例如執(zhí)行海洋救援任務(wù)、與海洋動(dòng)物互動(dòng)等。
三、特種機(jī)器人的發(fā)展趨勢
相對(duì)于一般的工業(yè)機(jī)器人及家用服務(wù)機(jī)器人,特種機(jī)器人的工作環(huán)境和作業(yè)條件更為復(fù)雜,對(duì)機(jī)器人結(jié)構(gòu)和功能也提出了更高的要求。因此,未來特種機(jī)器人領(lǐng)域?qū)⒊尸F(xiàn)出更多的創(chuàng)新和發(fā)展。
一是微型化。當(dāng)前,機(jī)器人的使用場景逐漸趨向于精確化、狹窄化和復(fù)雜化,這種任務(wù)場景的需求加速特種機(jī)器人向著微型化方向發(fā)展。微型機(jī)器人具有靈活性高、隱蔽性強(qiáng)的特點(diǎn),能夠在狹窄、危險(xiǎn)或難以到達(dá)的環(huán)境中執(zhí)行任務(wù)。2022年5月,中國清華大學(xué)研發(fā)出一種可在亞厘米級(jí)管道中高效運(yùn)動(dòng)的管道探測機(jī)器人,可用于航空發(fā)動(dòng)機(jī)管路檢修等相關(guān)領(lǐng)域。此外,在軍事應(yīng)用中,微型化機(jī)器人可以潛入敵方陣地,執(zhí)行偵察、監(jiān)聽和破壞任務(wù);在醫(yī)療領(lǐng)域,微型化機(jī)器人可以進(jìn)入人體內(nèi)部進(jìn)行精確的治療和手術(shù)。微型化已經(jīng)成為特種機(jī)器人領(lǐng)域中一個(gè)新興的研究分支,是當(dāng)前的研究熱點(diǎn)之一。
二是智能化。隨著人工智能和自主系統(tǒng)技術(shù)的進(jìn)一步發(fā)展,特種機(jī)器人將變得更加智能和自主,能夠更靈活地適應(yīng)各種任務(wù)環(huán)境。同時(shí),多模態(tài)感知、協(xié)作控制等技術(shù)將推動(dòng)特種機(jī)器人在多領(lǐng)域協(xié)同作業(yè)中發(fā)揮更大的作用。2023年6月,谷歌DeepMind發(fā)布RoboCat AI模型展現(xiàn)出機(jī)器人自我學(xué)習(xí)的巨大潛力,為機(jī)器人學(xué)研究提供了嶄新的方向。智能化特種機(jī)器人不僅能夠感知環(huán)境、作出決策,還能夠適應(yīng)復(fù)雜多變的任務(wù)場景。通過融合深度學(xué)習(xí)、機(jī)器學(xué)習(xí)等技術(shù),特種機(jī)器人可以從經(jīng)驗(yàn)中學(xué)習(xí),不斷提升自身的適應(yīng)能力和智能水平。
三是仿生化。自然界生物體經(jīng)過億年的進(jìn)化,形成了高度適應(yīng)環(huán)境的結(jié)構(gòu)和功能,一直以來都是研究人員開發(fā)新式特種機(jī)器人的靈感來源。通過模仿生物體,機(jī)器人可以獲得更高的適應(yīng)性,能夠在復(fù)雜和不確定的環(huán)境中執(zhí)行任務(wù)。機(jī)器人仿生化有助于其在特定環(huán)境中更隱蔽、安全地完成任務(wù)。2023年7月,美國加州大學(xué)圣地亞哥分校研究人員受小海龜啟發(fā)開發(fā)出一種新型機(jī)器人,它可以在沙子下游泳,還可以使用模仿海龜幼體超大鰭狀肢的前肢將自己挖出來。該機(jī)器人成為唯一能夠在5英寸深的沙子中行駛的機(jī)器人,可用于環(huán)境監(jiān)測、糧倉檢查和災(zāi)害應(yīng)對(duì)等多個(gè)領(lǐng)域。
四、結(jié)語
得益于人工智能技術(shù)、仿生學(xué)和新材料的發(fā)展,特種機(jī)器人的應(yīng)用領(lǐng)域不斷增加、功能愈發(fā)強(qiáng)大,部分機(jī)器學(xué)習(xí)和深度學(xué)習(xí)等技術(shù)使機(jī)器人能夠更好地感知環(huán)境、作出決策并執(zhí)行任務(wù)。展望未來,特種機(jī)器人將擁有更強(qiáng)大的人工智能、更高的自主性、更長的續(xù)航能力和更廣闊的應(yīng)用空間,繼續(xù)成為解決各種復(fù)雜任務(wù)和挑戰(zhàn)的有力工具。
中國傳動(dòng)網(wǎng)版權(quán)與免責(zé)聲明:凡本網(wǎng)注明[來源:中國傳動(dòng)網(wǎng)]的所有文字、圖片、音視和視頻文件,版權(quán)均為中國傳動(dòng)網(wǎng)(www.hysjfh.com)獨(dú)家所有。如需轉(zhuǎn)載請(qǐng)與0755-82949061聯(lián)系。任何媒體、網(wǎng)站或個(gè)人轉(zhuǎn)載使用時(shí)須注明來源“中國傳動(dòng)網(wǎng)”,違反者本網(wǎng)將追究其法律責(zé)任。
本網(wǎng)轉(zhuǎn)載并注明其他來源的稿件,均來自互聯(lián)網(wǎng)或業(yè)內(nèi)投稿人士,版權(quán)屬于原版權(quán)人。轉(zhuǎn)載請(qǐng)保留稿件來源及作者,禁止擅自篡改,違者自負(fù)版權(quán)法律責(zé)任。
產(chǎn)品新聞
更多>

2025-06-09

從外觀到內(nèi)核的「超進(jìn)化」!NK550M五軸...
2025-06-06

2025-05-19

2025-04-30

性能躍升20%!維宏NK300CX Plus數(shù)控系統(tǒng)...
2025-04-11
網(wǎng)站簡介|會(huì)員服務(wù)|聯(lián)系方式|幫助信息|版權(quán)信息|網(wǎng)站地圖|友情鏈接|法律支持|意見反饋|sitemap
傳動(dòng)網(wǎng)-工業(yè)自動(dòng)化與智能制造的全媒體“互聯(lián)網(wǎng)+”創(chuàng)新服務(wù)平臺(tái)
Chuandong.com Copyright ?2005 - 2025 ,All Rights Reserved 深圳市奧美大唐廣告有限公司 版權(quán)所有 粵ICP備 14004826號(hào) | 營業(yè)執(zhí)照證書 | 不良信息舉報(bào)中心 |  粵公網(wǎng)安備 44030402000946號(hào)
粵公網(wǎng)安備 44030402000946號(hào)












 網(wǎng)站客服
網(wǎng)站客服