以永ç£åŒæ¥é›»æ©Ÿ(jÄ«)é©…(qÅ«)å‹•(dòng)系統(tÇ’ng)而言,其安全狀態(tà i)一般是關(guÄn)管或者主動(dòng)çŸè·¯(ASC)兩種。
ã€€ã€€å› ?yà n)æ©›æ¥ç£îƒè¯«å§C(jÄ«)å˜åœ¨å電勢,如果在高速關(guÄn)管,å¯èƒ½æœƒ(huì)產(chÇŽn)生較大的發(fÄ)é›»æ‰çŸ©ï¼Œå°Ž(dÇŽo)致é•èƒŒå®‰å…¨ç›®æ¨™(biÄo),所以高速會(huì)è¨(shè)計(jì)主動(dòng)çŸè·¯ä½œç‚ºå®‰å…¨ç‹€æ…‹(tà i)。所謂的主動(dòng)çŸè·¯å°±æ˜¯ä¸»å‹•(dòng)將電機(jÄ«)的三相線çŸæŽ¥çš„方法,主動(dòng)çŸè·¯é€²(jìn)入穩(wÄ›n)æ…‹(tà i)åŽï¼Œæ°¸ç£åŒæ¥é›»æ©Ÿ(jÄ«)在ä¸é«˜é€Ÿå€(qÅ«)域的輸出轉(zhuÇŽn)矩約為0轉(zhuÇŽn)矩,滿足轉(zhuÇŽn)矩安全的è¦æ±‚。
  今天電控å°ç™½å°±ä¾†å’Œå¤§å®¶èŠä¸€èŠé›»æ©Ÿ(jÄ«)直接進(jìn)入主動(dòng)çŸè·¯æ™‚(shÃ)å‹•(dòng)æ…‹(tà i)é›»æµçš„變化情æ³ã€‚
  高速ASCçš„ç©©(wÄ›n)æ…‹(tà i)é›»æµç°¡æž
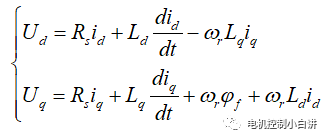
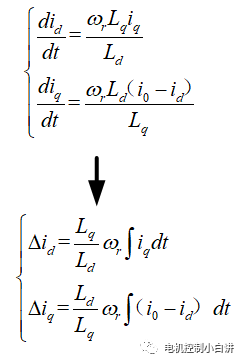
  我們先來簡單分æžä¸€ä¸‹æ°¸ç£åŒæ¥é›»æ©Ÿ(jÄ«)高速進(jìn)å…¥ASCåŽçš„å•é¡Œé›»æµæƒ…æ³ï¼Œç‚ºäº†åˆ†æžé€™å€‹(gè)å•é¡Œï¼Œé›»æŽ§å°ç™½åˆè¦åˆ©ç”¨æ°¸é (yuÇŽn)也離ä¸é–‹çš„æ°¸ç£åŒæ¥é›»æ©Ÿ(jÄ«)çš„DQ軸電壓方程啦:
  為了分æžç©©(wÄ›n)æ…‹(tà i)é›»æµï¼Œç°¡åŒ–為穩(wÄ›n)æ…‹(tà i)方程:
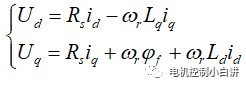
  主動(dòng)çŸè·¯æ˜¯ä½¿é›»æ©Ÿ(jÄ«)三相線çŸæŽ¥ï¼Œæ‰€ä»¥u(pÃng)då’Œuqå‡ç‚º0.å¯ä»¥æŽ¨å‡ºç©©(wÄ›n)æ…‹(tà i)é›»æµï¼š
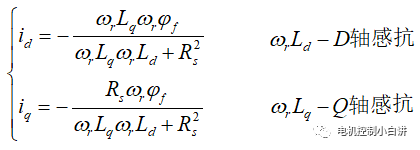
  從表é”(dá)å¼å¯ä»¥çœ‹å‡ºä¾†ï¼ŒD軸穩(wÄ›n)æ…‹(tà i)é›»æµå°äºŽ0.Q軸穩(wÄ›n)æ…‹(tà i)é›»æµèˆ‡è½‰(zhuÇŽn)速符號(hà o)相å;當(dÄng)電機(jÄ«)é‹(yùn)行在ä¸é«˜é€Ÿå€(qÅ«)域時(shÃ),DQ軸感抗會(huì)é (yuÇŽn)大于Rs,Q軸電æµå°‡ç´„為0.所以電機(jÄ«)工作在å°åŠŸçŽ‡(高速å°è½‰(zhuÇŽn)矩)發(fÄ)電狀態(tà i)。
  å°(duì)于電機(jÄ«)為什么一定處于å°è½‰(zhuÇŽn)矩發(fÄ)電狀態(tà i),其實(shÃ)很好ç†è§£ï¼šé›»æ©Ÿ(jÄ«)三相線çŸæŽ¥ï¼Œé›»æ©Ÿ(jÄ«)無法與直æµç«¯é€²(jìn)行能é‡äº¤äº’,但是åªè¦é›»æ©Ÿ(jÄ«)三相å˜åœ¨é›»æµï¼Œå°±å¿…然å˜åœ¨èƒ½é‡æ¶ˆè€—(銅æå’Œéµæ),這部分能é‡åªèƒ½å¾žå¤–界動(dòng)能轉(zhuÇŽn)åŒ–è€Œä¾†ï¼Œå› æ¤é›»æ©Ÿ(jÄ«)必然處于發(fÄ)電狀態(tà i),而且發(fÄ)電功率ä¸æœƒ(huì)太大(發(fÄ)é›»åŠŸçŽ‡å¿…é ˆç‰äºŽé›»æ©Ÿ(jÄ«)çš„æ耗功率)。
  忽略Rs相關(guÄn)é …(xià ng),得到近似的電æµè¡¨é”(dá)å¼ï¼š

ã€€ã€€å› æ¤å°(duì)于高速ASC,永ç£åŒæ¥é›»æ©Ÿ(jÄ«)çš„ç©©(wÄ›n)æ…‹(tà i)é›»æµå…¶å¯¦(shÃ)ç´„ç‰äºŽé›»æ©Ÿ(jÄ«)特å¾é›»æµi0.
  電動(dòng)狀態(tà i)進(jìn)å…¥ASCçš„å‹•(dòng)æ…‹(tà i)é›»æµåˆ†æž
  接下來我們繼續(xù)分æžé›»æ©Ÿ(jÄ«)進(jìn)å…¥ASCåŽçš„å‹•(dòng)æ…‹(tà i)éŽç¨‹ï¼š
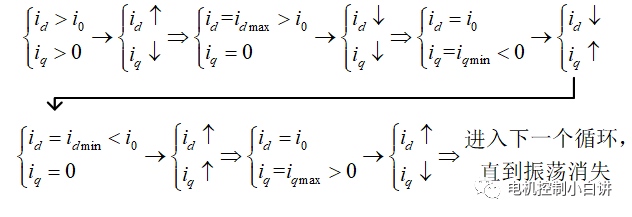
  為了方便分æžï¼Œå…ˆè¦(guÄ«)定一下工作狀態(tà i)å§ï¼šæ£è½‰(zhuÇŽn)ã€é›»å‹•(dòng)å·¥æ³ã€id>i0
  當(dÄng)電機(jÄ«)從æ£å¸¸å·¥ä½œç‹€æ…‹(tà i)進(jìn)å…¥ASC時(shÃ),電機(jÄ«)端電壓變?yÅu)?:
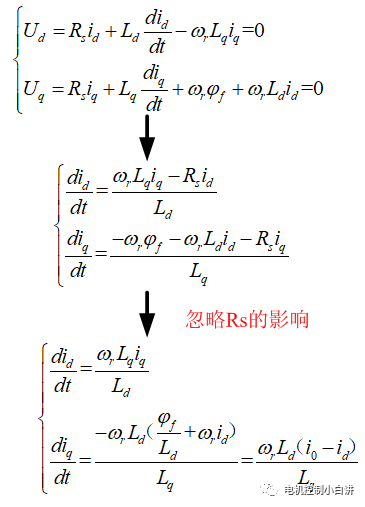
  從上é¢çš„表é”(dá)å¼å¯ä»¥çœ‹å‡ºï¼Œç•¶(dÄng)iq>0時(shÃ),id增大;iq<0時(shÃ),id減å°ã€‚當(dÄng)id>i0時(shÃ),iq減å°;當(dÄng)id
  為了驗(yà n)è‰å‰é¢é‚£éº»ç…©çš„å‹•(dòng)æ…‹(tà i)分æžæ˜¯ä¸æ˜¯æ£ç¢ºï¼Œé›»æŽ§å°ç™½åˆ©ç”¨Matlab仿真模型進(jìn)行仿真(è«‹?jiÄn)î…Žå¿žå¨åŒ¦â€œè¸ªYæºæœ‰é™ï¼Œæ²’辦法用真實(shÃ)臺(tái)架測試數(shù)æ“š(jù)了),這里給出仿真波形:
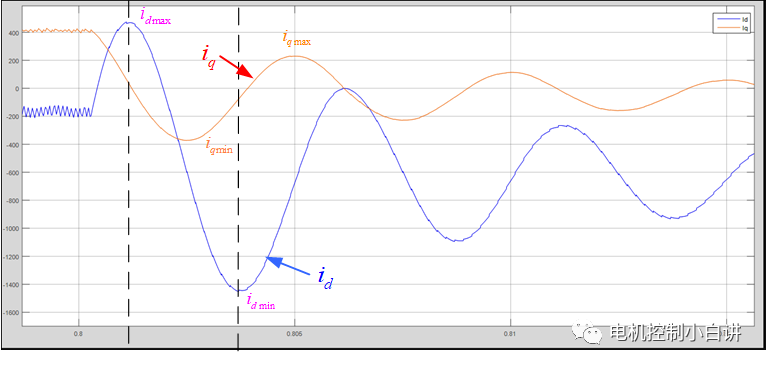
  從上é¢æ³¢å½¢å¯ä»¥çœ‹å‡ºï¼ŒDQ軸電æµçš„å‹•(dòng)æ…‹(tà i)變化éŽç¨‹èˆ‡é›»æŽ§å°ç™½å‰é¢çš„分æžåŸºæœ¬å»åˆï¼Œé€™èªªæ˜Žå‰é¢çš„分æžæ–¹æ³•æ˜¯æ£ç¢ºçš„(還好,能å»åˆï¼Œä¸ç„¶å°±å•ªå•ªæ‰“臉了)。
  從波形我們還能得到以下幾點(diÇŽn)çµ(jié)論:
  1ã€é›»æ©Ÿ(jÄ«)從æ£å¸¸é‹(yùn)行直接進(jìn)å…¥ASCåŽï¼Œå¯èƒ½æœƒ(huì)產(chÇŽn)生一個(gè)很大的電æµæ²–擊,沖擊電æµä¸»è¦ç”±D軸電æµå¼•ç™¼(fÄ),åŒæ™‚(shÃ)é›»æµæ²–擊發(fÄ)生在電機(jÄ«)從發(fÄ)電狀態(tà i)轉(zhuÇŽn)æ›ç‚ºé›»å‹•(dòng)狀態(tà i)å‰é¢ä¸€é»ž(diÇŽn)點(diÇŽn);
  2ã€D軸電æµçš„沖擊幅值å¯èƒ½é (yuÇŽn)大于穩(wÄ›n)æ…‹(tà i)é›»æµ(仿真波形ä¸D軸電æµæ²–æ“Šé”(dá)到了1450A);
  3ã€åˆ‡å…¥ASC會(huì)å°Ž(dÇŽo)致DQ軸電æµå½¢æˆæŒ¯è•©;
  4ã€åˆ‡å…¥ASC引發(fÄ)çš„é›»æµæŒ¯è•©å¹…值會(huì)é€æ¼¸è¡°æ¸›ï¼Œæœ€çµ‚é›»æµæ”¶æ–‚到穩(wÄ›n)點(diÇŽn)é›»æµå€¼ï¼ŒDQ軸電æµçš„波形是在穩(wÄ›n)æ…‹(tà i)值的基礎(chÇ”)ä¸Šç–ŠåŠ å¹…å€¼é€æ¼¸è¡°æ¸›çš„振蕩電æµ;
  5ã€Q軸電æµä¸çš„振蕩分é‡ç›¸ä½ä¸Šè¶…å‰D軸電æµæŒ¯è•©åˆ†é‡ç´„為90°(å°äºŽ90°)。
  Tips:
  1ã€ä»¿çœŸå·¥æ³ï¼šé›»æ©Ÿ(jÄ«)é‹(yùn)è¡Œé›»é »çŽ‡200Hz,進(jìn)å…¥ASCå‰é›»æ©Ÿ(jÄ«)Id=-200A,Iq=400A,高速主動(dòng)çŸè·¯ç©©(wÄ›n)æ…‹(tà i)é›»Id約為-600A;
  2ã€DQ軸電æµçš„æŒ¯è•©é »çŽ‡èˆ‡é›»æ©Ÿ(jÄ«)çš„é›»é »çŽ‡ç›¸åŒï¼ŒåŒç‚º200Hz;
  3ã€æ²–æ“Šé›»æµç‚ºä»€ä¹ˆä¸»è¦ç”±D軸電æµå½¢æˆï¼šå› ?yà n)镈Q軸電æµæ˜¯æ£äº¤çš„é›»æµï¼Œé›»æµçŸ¢é‡çš„幅值是DQ軸電æµçš„平方和,åŒæ™‚(shÃ)當(dÄng)D軸電æµé”(dá)到峰值時(shÃ),Q軸電æµç´„為0.所以å¯ä»¥å¿½ç•¥æ¤æ™‚(shÃ)çš„Q軸電æµå°(duì)é›»æµå¹…值的影響;
  4ã€ç‚ºä»€ä¹ˆD軸電æµæœ€å¤§å€¼å°(duì)應(yÄ«ng)çš„ä¸æ˜¯å‰é¢åˆ†æžçš„Q軸電æµç‚º0時(shÃ)åˆ»ï¼šå› ?yà n)æ¦æ‡Šå¨£æ²»é²‹æƒºå‘›é›Žç²¤ç¡•ã„—与娮鑂s的影響,如果引入Rs的影響,那分æžçµ(jié)果就與波形能å°(duì)應(yÄ«ng),這里電控å°ç™½å°±ä¸åœ¨ç門弄斧了,感興趣的讀者å¯ä»¥è‡ªè¡Œåˆ†æž;
  5ã€ç‚ºä»€ä¹ˆé›»æµä¸çš„振蕩分é‡æœƒ(huì)é€æ¼¸è¡°æ¸›åˆ°0ï¼šå› ?yà n)æ©›å¸ã„—与娮璧拇嬖冢ㄗ与娮钑?huì)消耗振蕩的能é‡ï¼Œä½¿é›»æµé€æ¼¸æ”¶æ–‚;也å¯ä»¥å¾žå¦å¤–一個(gè)角度來ç†è§£é€™å€‹(gè)å•é¡Œï¼Œé›»é˜»å’Œé›»æ„Ÿæ§‹(gòu)æˆäº†ä¸€éšŽä½Žé€šæ¿¾æ³¢å™¨ï¼Œå®ƒå°(duì)交æµé‡å˜åœ¨è¡°æ¸›çš„作用,所以最終交æµæˆåˆ†æœƒ(huì)被衰減到0;
  6ã€ç‚ºä»€ä¹ˆæ²–æ“Šé›»æµæœ€å¤§å¹…值一定是出ç¾(xià n)在電機(jÄ«)從發(fÄ)é›»éŽæ¸¡åˆ°é›»å‹•(dòng)å‰ä¸€é»ž(diÇŽn)點(diÇŽn):這個(gè)å•é¡Œå¯ä»¥å¾žèƒ½é‡çš„角度來ç†è§£ï¼ŒDQ軸電æµè¶Šå¤§ï¼Œå°(duì)應(yÄ«ng)的電機(jÄ«)電感儲(chÇ”)å˜çš„能é‡å°±è¶Šå¤šï¼Œé›»æ©Ÿ(jÄ«)進(jìn)å…¥ASC狀態(tà i)åŽï¼Œèƒ½é‡åªèƒ½èˆ‡æ©Ÿ(jÄ«)械能交互;電動(dòng)狀態(tà i)是將電感ç£å ´èƒ½è½‰(zhuÇŽn)æ›ç‚ºæ©Ÿ(jÄ«)械能,電感電æµæ¸›å°;發(fÄ)電則是將機(jÄ«)械能轉(zhuÇŽn)æ›ç‚ºé›»æ„Ÿç£å ´èƒ½ï¼Œé›»æ„Ÿé›»æµå¢žå¤§;所以發(fÄ)電狀態(tà i)下的電æµå¹…值一定大于電動(dòng)狀態(tà i);åŒæ™‚(shÃ)電機(jÄ«)自身å˜åœ¨æ耗(銅æå’Œéµæ)ï¼Œå› æ¤ç•¶(dÄng)發(fÄ)電功率ç‰äºŽé›»æ©Ÿ(jÄ«)自身æ耗時(shÃ),電感的能é‡é”(dá)到最大,å°(duì)應(yÄ«ng)é›»æµé”(dá)到最大。
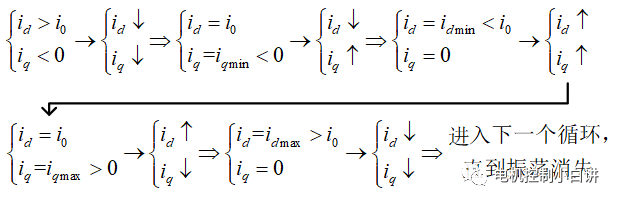
  發(fÄ)電狀態(tà i)進(jìn)å…¥ASCçš„å‹•(dòng)æ…‹(tà i)é›»æµåˆ†æž
  å‰é¢åˆ†æžäº†é›»å‹•(dòng)狀態(tà i)進(jìn)å…¥ASCçš„å‹•(dòng)æ…‹(tà i)é›»æµè®ŠåŒ–éŽç¨‹ï¼Œæˆ‘們繼續(xù)來分æžä¸€ä¸‹å¾žç™¼(fÄ)電狀態(tà i)切æ›ASCçš„é›»æµçš„å‹•(dòng)æ…‹(tà i)變化éŽç¨‹ï¼ŒåŒæ¨£é‚„是借用å‰é¢çš„å…¬å¼ï¼š
  電控å°ç™½åŒæ¨£åˆ©ç”¨ä»¿çœŸä¾†é©—(yà n)è‰åˆ†æžæ˜¯å¦æ£ç¢ºï¼š
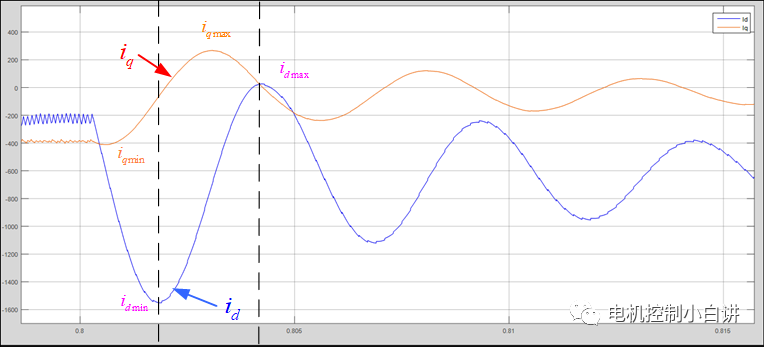
  從上é¢æ³¢å½¢å¯ä»¥çœ‹å‡ºï¼ŒDQ軸電æµçš„å‹•(dòng)æ…‹(tà i)變化éŽç¨‹èˆ‡é›»æŽ§å°ç™½å‰é¢çš„分æžåŸºæœ¬å»åˆï¼Œé€™èªªæ˜Žå‰é¢çš„分æžæ–¹æ³•æ˜¯æ£ç¢ºçš„。
  從波形我們åŒæ¨£èƒ½å¾—到與電動(dòng)å·¥æ³ç›¸åŒçš„çµ(jié)論,電控å°ç™½å°±ä¸åœ¨é€™é‡Œç¾…里å§å—¦ï¼Œè€½èª¤å„ä½çœ‹å®˜å¤§äººçš„寶貴時(shÃ)間了。
  å°(duì)比電動(dòng)與發(fÄ)電的波形,其實(shÃ)ä¸é›£ç™¼(fÄ)ç¾(xià n):電動(dòng)狀態(tà i)最終會(huì)進(jìn)入和發(fÄ)電相åŒçš„é›»æµè®ŠåŒ–éŽç¨‹ï¼Œé›»å‹•(dòng)狀態(tà i)相比發(fÄ)電狀態(tà i)åªæ˜¯å¢žåŠ 了å‰é¢ä¸€æ®µéŽæ¸¡åˆ°ç™¼(fÄ)電的變化éŽç¨‹ï¼Œä½†æ˜¯å°(duì)最大沖擊電æµå‡ºç¾(xià n)çš„å·¥æ³é»ž(diÇŽn)沒有任何影響。
  DQ軸動(dòng)æ…‹(tà i)é›»æµæŒ¯è•©åˆ†é‡å¹…值關(guÄn)ç³»
  我們首先來分æžä¸€ä¸‹DQ軸振蕩分é‡çš„幅值關(guÄn)系,先定義一下分æžçš„時(shÃ)候需è¦ä½¿ç”¨çš„變é‡ï¼Œé˜²æ¢å¤§å®¶åŽé¢ä¸çŸ¥é“我在說啥。
  i0—電機(jÄ«)特å¾é›»æµ
  idm—D軸電æµæŒ¯è•©åˆ†é‡å¹…值
  iqm—Q軸電æµæŒ¯è•©åˆ†é‡å¹…值
  基于å‰é¢åˆ†æžä¸è«–是電動(dòng)還是發(fÄ)電最終都會(huì)進(jìn)入發(fÄ)電工æ³ï¼Œæ‰€ä»¥é€™é‡Œç›´æŽ¥ä»¥ç™¼(fÄ)電工æ³ä¾†åˆ†æžï¼ŒåŒæ™‚(shÃ)為了簡化分æžï¼Œæˆ‘們先ä¸è€ƒæ…®é›»é˜»å°(duì)振蕩的衰減作用,å³èª(rèn)為振蕩幅值æ’定ä¸è®Šï¼š
  利用å‰é¢åˆ†æžé›»æµå‹•(dòng)æ…‹(tà i)變化時(shÃ)使用的公å¼é€²(jìn)è¡Œé©ç•¶(dÄng)?shù)淖冃å±?/p>
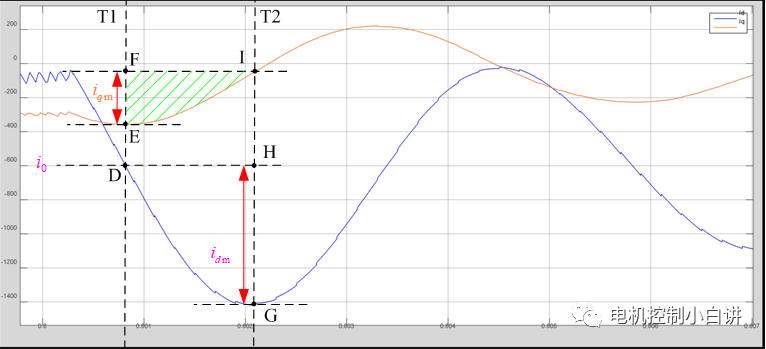
  上é¢æ³¢å½¢ä¸T1到T2之間的波形æ£å¥½å°(duì)應(yÄ«ng)DQ軸振蕩分é‡çš„四分之一周期;å› æ¤å¾žT1時(shÃ)刻到T2時(shÃ)刻,D軸電æµçš„變化é‡æ£å¥½æ˜¯è«§æŒ¯åˆ†é‡çš„幅值Idm;åŒæ™‚(shÃ)iq在T1到T2的定ç©åˆ†å€¼ç‚ºåœ–ä¸ç¶ 色陰影é¢ç©ï¼Œé€™é‡Œå¯ä»¥ç”¨å®šç©åˆ†å…¬å¼è¨ˆ(jì)算出iqçš„ç©åˆ†å€¼ï¼š
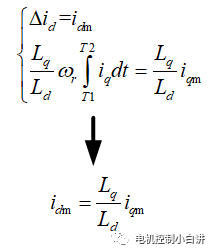
  從DQ軸振蕩電æµå¹…值的å°(duì)應(yÄ«ng)é—œ(guÄn)系,能看出來,å°(duì)于內(nèi)ç½®å¼å‡¸æ¥µé›»æ©Ÿ(jÄ«)而言(Ld
  D軸電æµæŒ¯è•©åˆ†é‡å¹…值計(jì)ç®—
  相信åªæ˜¯åˆ†æžåˆ°DQ軸振蕩電æµå¹…值的å°(duì)應(yÄ«ng)é—œ(guÄn)系大家肯定ä¸æœƒ(huì)滿æ„,電控å°ç™½æŽ¥ä¸‹ä¾†å°±åˆ†æžä¸€ä¸‹D軸電æµçš„最大幅值是多少,我們åŒæ¨£é‚„是直接分æžç™¼(fÄ)電工æ³ã€‚
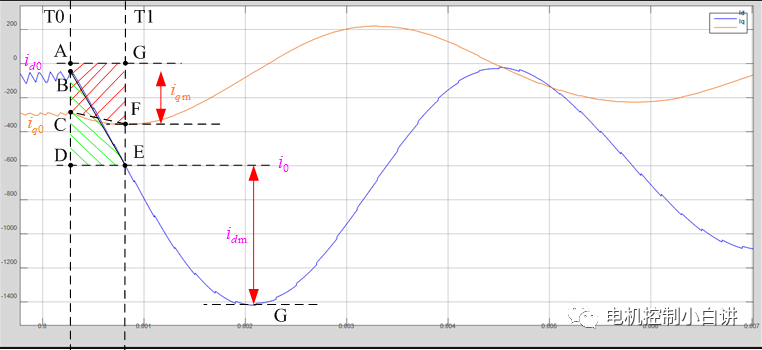
  還是利用å‰é¢çš„定ç©åˆ†å…¬å¼ï¼Œä¸éŽé€™æ¬¡æˆ‘們是å°(duì)T0到T1這段時(shÃ)間進(jìn)行定ç©åˆ†ï¼Œå‡å®šT0到T1的時(shÃ)間為t:
  D軸電æµçš„變化é‡ç‚º(i0-id0);iq的定ç©åˆ†ç‚ºåœ–ä¸ç´…色陰影å€(qÅ«)域é¢ç©çš„相å數(shù),為了計(jì)算方便,我們以梯形ACFGçš„é¢ç©ä¾†è¿‘ä¼¼ç‰æ•ˆç´…色陰影é¢ç©ã€‚
  Q軸電æµçš„變化é‡ç‚º(-iqm-iq0);(i0-id)的定ç©åˆ†ç‚ºåœ–ä¸ç¶ 色陰影å€(qÅ«)域é¢ç©çš„相å數(shù),åŒæ¨£ç‚ºäº†æ–¹ä¾¿è¨ˆ(jì)算,我們以三角形BDEçš„é¢ç©ä¾†è¿‘ä¼¼ç‰æ•ˆç¶ 色陰影é¢ç©ã€‚
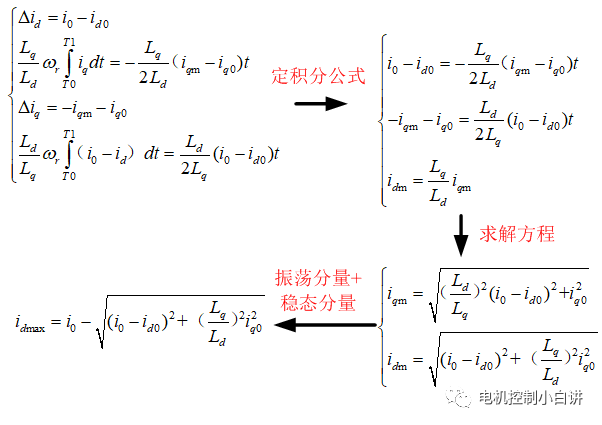
  從D軸沖擊電æµå¹…值公å¼å¯ä»¥çœ‹å‡ºä¾†ï¼Œé›»æµæ²–擊的大å°ä¸åƒ…與電機(jÄ«)本體åƒæ•¸(shù)相關(guÄn),還與進(jìn)å…¥ASC時(shÃ)刻的電æµåˆå§‹å€¼ç›¸é—œ(guÄn)。
  Tips:
  1ã€ä»¥ä¸Šåˆ†æžæ˜¯åœ¨å¿½ç•¥å®šå電阻Rs影響下進(jìn)è¡Œçš„ï¼Œå› æ¤é€™é‡Œåˆ†æžçš„是振蕩電æµç„¡è¡°æ¸›æƒ…æ³ä¸‹çš„é›»æµæœ€å¤§å€¼;
  2ã€çœŸå¯¦(shÃ)情æ³ä¸‹ï¼Œå› ?yà n)榇嬖赗s的衰減作用,所以電æµæ²–擊的幅值一般會(huì)å°äºŽé€™é‡Œåˆ†æžçš„數(shù)值。
  總çµ(jié)
  這次分享主è¦åˆ†æžäº†æ°¸ç£åŒæ¥é›»æ©Ÿ(jÄ«)高速從æ£å¸¸é‹(yùn)行工æ³ç›´æŽ¥é€²(jìn)å…¥ASCåŽï¼Œé›»æµçš„å‹•(dòng)æ…‹(tà i)變化éŽç¨‹ã€‚
  1ã€é›»æ©Ÿ(jÄ«)進(jìn)å…¥ASCåŽï¼Œæœƒ(huì)在DQ軸產(chÇŽn)生振蕩電æµï¼ŒæŒ¯è•©é›»æµçš„é »çŽ‡èˆ‡é›»æ©Ÿ(jÄ«)é‹(yùn)è¡Œé »çŽ‡ç›¸åŒ;
  2ã€å› ?yà n)槎ㄗ与娮璧拇嬖冢袷庪å¨é²¿?huì)é€æ¼¸è¡°æ¸›ï¼ŒDQ軸電æµæœ€çµ‚會(huì)收斂到ASCç©©(wÄ›n)æ…‹(tà i)é›»æµ;
  3ã€æ°¸ç£åŒæ¥é›»æ©Ÿ(jÄ«)進(jìn)å…¥ASCåŽçš„ç©©(wÄ›n)æ…‹(tà i)工作電æµåŸºæœ¬ç‰äºŽé›»æ©Ÿ(jÄ«)的特å¾é›»æµï¼ŒåŒæ™‚(shÃ)電機(jÄ«)處于å°åŠŸçŽ‡ç™¼(fÄ)電狀態(tà i);
  4ã€ä¸è«–電機(jÄ«)從何種工æ³é€²(jìn)å…¥ASC,其最終都會(huì)進(jìn)入相åŒçš„收斂工æ³ï¼Œæœ€å¤§æ²–æ“Šé›»æµç”±D軸電æµå¼•ç™¼(fÄ);
  5ã€æ²–æ“Šé›»æµçš„最大值ä¸åƒ…å–決于電機(jÄ«)本身的åƒæ•¸(shù),還與進(jìn)å…¥ASC瞬間的電æµåˆå§‹å€¼ç›¸é—œ(guÄn)。
  以上就是本次的分享內(nèi)容,希望電控å°ç™½çš„這次分享能讓您å°(duì)ç†è§£æ°¸ç£åŒæ¥é›»æ©Ÿ(jÄ«)電機(jÄ«)ASCçš„å‹•(dòng)æ…‹(tà i)é›»æµéŽç¨‹æœ‰æ‰€å¹«åŠ©ã€‚


















 網(wÇŽng)站客æœ
網(wÇŽng)站客æœ 粵公網(wÇŽng)安備 44030402000946號(hà o)
粵公網(wǎng)安備 44030402000946號(hà o)