時間:2018-04-27 11:28:35來源:網絡轉載
一.機電一體化及其機床電氣控制技術的發展概況
機電一體化技術是隨著科學技術不斷發展,生產工藝不斷提出新要求而迅速發展的。在控制方法上主要是從手動到自動;在控制功能上,是從簡單到復雜;在操作上,是由笨重到輕巧。隨著新的控制理論和新型電器及電子器件的出現,又為電氣控制技術的發展開拓了新途徑。
傳統機床電氣控制是繼電器接觸式控制系統,由繼電器、接觸器、按鈕、行程開關等組成,實現對機床的啟動、停車、有極調速等控制。繼電器接觸式控制系統的優點是結構簡單、維護方便、抗干擾強、價格低,因此廣泛應用于各類機床和機械設備。目前,在我國繼電器接觸式控制仍然是機床和其他機械設備最基本的電氣控制形式之一。
在實際生產中,由于大量存在一些用開關量控制的簡單的程序控制過程,而實際生產工藝和流程又是經常變化的,因而傳統的繼電器接觸式控制系統常不能滿足這種要求,因此曾出現了繼電器接觸控制和電子技術相結合的控制裝置,叫做順序控制器。它能根據生產需要改變控制程序,而又遠比電子計算機結構簡單,價格低廉,它是通過組合邏輯元件插接或編程來實現繼電器接觸控制的。但它的裝置體積大,功能也受到一定限制。隨著大規模集成電路和微處理機技術的發展及應用,上述控制技術也發生了根本性的變化,在上世紀70年代出現了將計算機的存儲技術引入順序控制器,產生了新型工業控制器——可編程序控制器(PLC),它兼備了計算機控制和繼電器控制系統兩方面的優點,故目前在世界各國已作為一種標準化通用裝置普遍應用于工業控制。
為解決占機械總加工量80%左右的單件和小批量生產的自動化難題,50年代出現了數控機床。它綜合應用了電子、計算機、檢測、自動控制和機床結構設計等各個技術領域的最新技術成就,它是典型的機電一體化產品。數控機床經過40年來的發展,品種日益增多,性能不斷完善,其中以輪廓控制的數控機床和帶有自動換刀裝置和工作臺能自動轉位的數控加工中心發展更為迅速。數控機床由控制介質、數控裝置、伺服系統和機床本體等部分組成,其中伺服系統的性能是決定數控機床加工精度和生產率的主要因素之一。
二.伺服系統在數控加工中的作用及組成
在自動控制系統中,把輸出量能以一定準確度跟隨輸入量的變化而變化的系統稱為隨動系統,亦稱伺服系統。數控機床的伺服系統是指以機床移動部件的位置和速度作為控制量的自動控制系統,又稱為隨動系統。
伺服系統由伺服驅動裝置和驅動元件(或稱執行元件伺服電機)組成,高性能的伺服系統還有檢測裝置,反饋實際的輸出狀態。
數控機床伺服系統的作用在于接受來自數控裝置的指令信號,驅動機床移動部件跟隨指令脈沖運動,并保證動作的快速和準確,這就要求高質量的速度和位置伺服。以上指的主要是進給伺服控制,另外還有對主運動的伺服控制,不過控制要求不如前者高。數控機床的精度和速度等技術指標往往主要取決于伺服系統。
三.伺服系統的基本要求和特點
1.對伺服系統的基本要求
(1)穩定性好:穩定是指系統在給定輸入或外界干擾作用下,能在短暫的調節過程后到達新的或者回復到原有平衡狀態。
(2)精度高:伺服系統的精度是指輸出量能跟隨輸入量的精確程度。作為精密加工的數控機床,要求的定位精度或輪廓加工精度通常都比較高,允許的偏差一般都在0.01~0.00lmm之間。
(3)快速響應性好:快速響應性是伺服系統動態品質的標志之一,即要求跟蹤指令信號的響應要快,一方面要求過渡過程時間短,一般在200ms以內,甚至小于幾十毫秒;另一方面,為滿足超調要求,要求過渡過程的前沿陡,即上升率要大。
2.伺服系統的主要特點
(1)精確的檢測裝置:以組成速度和位置閉環控制。
(2)有多種反饋比較原理與方法:根據檢測裝置實現信息反饋的原理不同,伺服系統反饋比較的方法也不相同。目前常用的有脈沖比較、相位比較和幅值比較3種。
(3)高性能的伺服電動機(簡稱伺服電機):用于高效和復雜型面加工的數控機床,伺服系統將經常處于頻繁的啟動和制動過程中。要求電機的輸出力矩與轉動慣量的比值大,以產生足夠大的加速或制動力矩。要求伺服電機在低速時有足夠大的輸出力矩且運轉平穩,以便在與機械運動部分連接中盡量減少中間環節。
(4)寬調速范圍的速度調節系統,即速度伺服系統:從系統的控制結構看,數控機床的位置閉環系統可看作是位置調節為外環、速度調節為內環的雙閉環自動控制系統,其內部的實際工作過程是把位置控制輸入轉換成相應的速度給定信號后,再通過調速系統驅動伺服電機,實現實際位移。數控機床的主運動要求調速性能也比較高,因此要求伺服系統為高性能的寬調速系統。
四.伺服系統的分類
伺服系統按其驅動元件劃分,有步進式伺服系統、直流電動機(簡稱直流電機)伺服系統、交流電動機(簡稱交流電機)伺服系統。按控制方式劃分,有開環伺服系統、閉環伺服系統和半閉環伺服系統等,實際上數控系統也分成開環、閉環和半閉環3種類型,就是與伺服系統這3種方式相關。
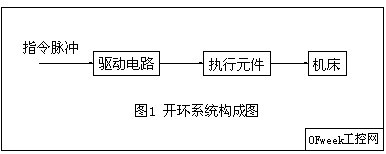
1.開環系統
圖1是開環系統構成圖,它主要由驅動電路,執行元件和機床3大部分組成。常用的執行元件是步進電機,通常稱以步進電機作為執行元件的開環系統為步進式伺服系統,在這種系統中,如果是大功率驅動時,用步進電機作為執行元件。驅動電路的主要任務是將指令脈沖轉化為驅動執行元件所需的信號。
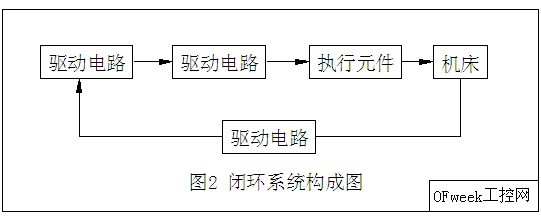
2.閉環系統
閉環系統主要由執行元件、檢測單元、比較環節、驅動電路和機床5部分組成。其構成框圖如圖2所示。在閉環系統中,檢測元件將機床移動部件的實際位置檢測出來并轉換成電信號反饋給比較環節。常見的檢測元件有旋轉變壓器、感應同步器、光柵、磁柵和編碼盤等。通常把安裝在絲杠上的檢測元件組成的伺服系統稱為半閉環系統;把安裝在工作臺上的檢測元件組成的伺服系統稱為閉環系統。由于絲杠和工作臺之間傳動誤差的存在,半閉環伺服系統的精度要比閉環伺服系統的精度低一些。
比較環節的作用是將指令信號和反饋信號進行比較,兩者的差值作為伺服系統的跟隨誤差,經驅動電路,控制執行元件帶動工作臺繼續移動,直到跟隨誤差為零。根據進入比較環節信號的形式以及反饋檢測方式,閉環(半閉環)系統可分為脈沖比較伺服系統、相位比較伺服系統和幅值比較伺服系統3種。
由于比較環節輸出的信號比較微弱,不足以驅動執行元件,故需對其進行放大,驅動電路正是為此而設置的。
執行元件的作用是根據控制信號,即來自比較環節的跟隨誤差信號,將表示位移量的電信號轉化為機械位移。常用的執行元件有直流寬調速電動機、交流電動機等。執行元件是伺服系統中必不可少的一部分,驅動電路是隨執行元件的不同而不同的。
最近,我校研制開發出了高性能交流伺服(數控機床)控制系統。該系統性能穩定,質量可靠,可廣泛應用于數碼雕刻,包裝機械,模具生產等工業生產應用場合,更適用于高等學校機電一體化,電子電器,電氣自動化專業學生(研究生)生產實習,課程設計等課程的實驗研究。
五.伺服系統的發展方向
隨著生產力不斷發展,要求伺服系統向高精度、高速度、大功率方向發展。
(1)充分利用迅速發展的電子和計算機技術,采用數字式伺服系統,利用微機實現調節控制,增強軟件控制功能,排除模擬電路的非線性誤差和調整誤差以及溫度漂移等因素的影響,這可大大提高伺服系統的性能,并為實現最優控制、自適應控制創造條件。
(2)開發高精度、快速檢測元件。
(3)開發高性能的伺服電機(執行元件)。目前交流伺服電機的變速比已達1∶10000,使用日益增多。無刷電機因無電刷和換向片零部件,加速性能要比直流伺服電機高兩倍,維護也較方便,常用于高速數控機床。
標簽:
![]()
上一篇:大族電機直線電機小科普
下一篇:電液伺服系統校正禁忌
中國傳動網版權與免責聲明:凡本網注明[來源:中國傳動網]的所有文字、圖片、音視和視頻文件,版權均為中國傳動網(www.hysjfh.com)獨家所有。如需轉載請與0755-82949061聯系。任何媒體、網站或個人轉載使用時須注明來源“中國傳動網”,違反者本網將追究其法律責任。
本網轉載并注明其他來源的稿件,均來自互聯網或業內投稿人士,版權屬于原版權人。轉載請保留稿件來源及作者,禁止擅自篡改,違者自負版權法律責任。
產品新聞
更多>
2025-06-16

2025-06-09

2025-06-06

2025-05-19

2025-04-30

2025-04-11












 網站客服
網站客服 粵公網安備 44030402000946號
粵公網安備 44030402000946號