時(shí)間:2018-03-02 10:50:49來(lái)源:網(wǎng)絡(luò)轉(zhuǎn)載
1轉(zhuǎn)爐傳動(dòng)系統(tǒng)特點(diǎn)
轉(zhuǎn)爐設(shè)備是煉鋼廠的關(guān)鍵生產(chǎn)設(shè)備,其爐體外形如圖1示。轉(zhuǎn)爐像一個(gè)“掛著的水桶”。轉(zhuǎn)爐系統(tǒng)主要電力傳動(dòng)設(shè)備包括爐體傾動(dòng)的電力傳動(dòng)設(shè)備及氧槍傳動(dòng)的電力控制設(shè)備。下面介紹爐體傾動(dòng)的電力傳動(dòng)設(shè)備。
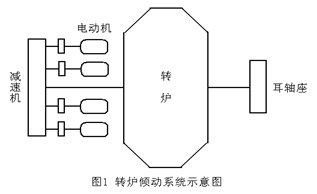
在大中型轉(zhuǎn)爐系統(tǒng)中,爐體傾動(dòng)部分一般采用四臺(tái)傾動(dòng)電機(jī),通過(guò)減速機(jī)剛性連接,并采用全懸掛固定方式和扭力矩吸收方式。
煉鋼廠轉(zhuǎn)爐傾動(dòng)裝置在實(shí)際生產(chǎn)操作過(guò)程中,需對(duì)轉(zhuǎn)爐傾動(dòng)裝置進(jìn)行頻繁的起動(dòng)、制動(dòng)及加減速操作,所以對(duì)傾動(dòng)裝置的控制精度及系統(tǒng)的響應(yīng)時(shí)間有很高的要求。轉(zhuǎn)爐傾動(dòng)負(fù)載特性及電動(dòng)機(jī)運(yùn)轉(zhuǎn)狀態(tài)分析如下:
根據(jù)轉(zhuǎn)爐控制工藝要求,轉(zhuǎn)爐的傾動(dòng)角度為正反360°,當(dāng)轉(zhuǎn)爐爐口與爐底方向軸線與地平面垂直時(shí)為垂直狀態(tài),故轉(zhuǎn)爐傾動(dòng)負(fù)載力矩為角度的函數(shù),即Tfz=f(θ),屬于反阻性的位能負(fù)載。另外,根據(jù)工藝設(shè)計(jì)說(shuō)明,轉(zhuǎn)爐按正力矩設(shè)計(jì),即轉(zhuǎn)爐的耳軸下部比上部高,下部比上部重,從而保證轉(zhuǎn)爐控制系統(tǒng)的穩(wěn)定性。在轉(zhuǎn)爐傾動(dòng)裝置的實(shí)際操作中,進(jìn)行倒渣或出鋼時(shí),可能出現(xiàn)負(fù)力矩。當(dāng)轉(zhuǎn)爐爐體處于正力矩狀態(tài)時(shí),電動(dòng)機(jī)處于電動(dòng)運(yùn)行狀態(tài),當(dāng)轉(zhuǎn)爐爐體處于負(fù)力矩狀態(tài)時(shí),電動(dòng)機(jī)處于發(fā)電運(yùn)行狀態(tài),此時(shí)電動(dòng)機(jī)處于回饋制動(dòng)狀態(tài),傾動(dòng)裝置的驅(qū)動(dòng)電動(dòng)機(jī)的機(jī)械特性和負(fù)載特性如圖2所示:

2轉(zhuǎn)爐傾動(dòng)控制系統(tǒng)的基本要求
(1)四臺(tái)電動(dòng)機(jī)同步啟動(dòng)、制動(dòng)及同步運(yùn)行,根據(jù)要求轉(zhuǎn)爐可以在0.2~1.0r/min之間進(jìn)行傾動(dòng)速度調(diào)節(jié),轉(zhuǎn)爐可以做±360°旋轉(zhuǎn)。
(2)當(dāng)轉(zhuǎn)爐正在出鋼、出渣時(shí),交流電源系統(tǒng)發(fā)生停電故障,此時(shí)利用UPS電源將4臺(tái)制動(dòng)器打開(kāi),轉(zhuǎn)爐依靠自重復(fù)位,轉(zhuǎn)爐處于安全位置。
(3)當(dāng)轉(zhuǎn)爐出現(xiàn)塌爐等事故時(shí),傾動(dòng)機(jī)械的機(jī)電設(shè)備能短時(shí)過(guò)載,轉(zhuǎn)爐以0.2r/min速度旋轉(zhuǎn),傾動(dòng)轉(zhuǎn)爐倒出爐內(nèi)裝盛物,然后進(jìn)行事故處理。
(4)轉(zhuǎn)爐為全正力矩設(shè)計(jì),即在整個(gè)工作傾動(dòng)角度內(nèi)由0°~士180°方向傾動(dòng)均為正力矩。
(5)為防止電動(dòng)機(jī)突然啟動(dòng)對(duì)設(shè)備的沖擊,轉(zhuǎn)爐開(kāi)始傾動(dòng)時(shí)電動(dòng)機(jī)轉(zhuǎn)速應(yīng)從零開(kāi)始逐漸加速,從零到正常速度的加速時(shí)間是2s。
(6)由于制動(dòng)器制動(dòng)力矩較大,為了防止制動(dòng)時(shí)對(duì)設(shè)備的沖擊,轉(zhuǎn)爐制動(dòng)時(shí)應(yīng)先通過(guò)能耗制動(dòng)將電動(dòng)機(jī)減速,當(dāng)轉(zhuǎn)爐傾動(dòng)速度接近零時(shí),制動(dòng)器失電制動(dòng),制動(dòng)時(shí)間為2S。
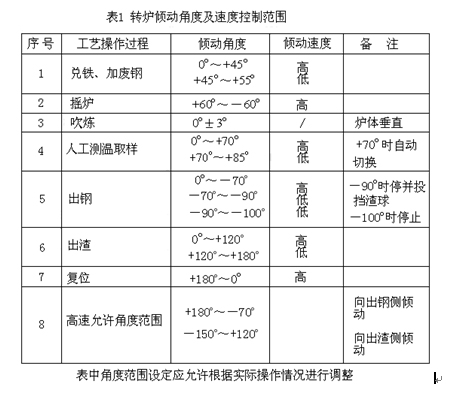
(7)轉(zhuǎn)爐冶煉工藝過(guò)程轉(zhuǎn)動(dòng)角度及速度控制范圍要求見(jiàn)表1。
3山東某鋼鐵集團(tuán)50T轉(zhuǎn)爐主要控制難點(diǎn)
3.1主要控制難點(diǎn)
轉(zhuǎn)爐控制主要完成爐前的爐門(mén)動(dòng)作和爐體的傾動(dòng)操作,爐后傾爐和出鋼鋼包車(chē)、出渣渣車(chē)操作,煙罩的升降操作和冷卻水流量、壓力聯(lián)鎖控制,氧槍的升降操作和氧槍定位及冷卻水流量壓力聯(lián)鎖控制,氧槍橫移換槍操作,上料稱(chēng)重和進(jìn)料操作,并完成轉(zhuǎn)爐水冷煙罩、水冷爐壁、水冷氧槍等水冷系統(tǒng)多個(gè)測(cè)溫點(diǎn)溫度變化的實(shí)施數(shù)據(jù)采集以及冷卻水系統(tǒng)壓力、流量等實(shí)時(shí)數(shù)據(jù)采集監(jiān)視和超限及事故報(bào)警。通過(guò)以太網(wǎng)實(shí)現(xiàn)PLC和操作站之間的實(shí)時(shí)數(shù)據(jù)傳送,由人機(jī)界面完成生產(chǎn)過(guò)程監(jiān)控。圖3為轉(zhuǎn)爐現(xiàn)場(chǎng)圖。
其中,四臺(tái)轉(zhuǎn)爐傾動(dòng)電機(jī)的控制是該項(xiàng)目中技術(shù)難度最大的課題,要求必須做到快速響應(yīng),控制精度、安全可靠性能要求比較高。設(shè)計(jì)采用的傳動(dòng)控制裝置是風(fēng)光JD-BP32系列變頻器產(chǎn)品,型號(hào)為JD-BP32-315T(315kW/380V),較好地解決了以上難題。
3.2轉(zhuǎn)爐傾動(dòng)變頻控制方式選擇
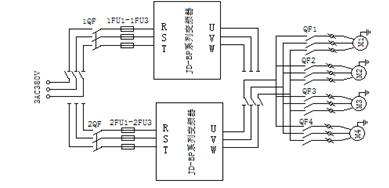
根據(jù)近幾年轉(zhuǎn)爐傾動(dòng)控制系統(tǒng)的設(shè)計(jì)和應(yīng)用情況,設(shè)計(jì)單位針對(duì)“一拖四”控制方式(即一臺(tái)變頻器拖動(dòng)四臺(tái)電動(dòng)機(jī))和“四拖四”主從控制方式進(jìn)行了認(rèn)真的比較,認(rèn)為“一拖四”的控制方式,系統(tǒng)簡(jiǎn)單,易編程調(diào)試和維護(hù),從安全、合理的角度考慮,每座轉(zhuǎn)爐另外設(shè)一套變頻器裝置作為備用,以化解轉(zhuǎn)爐正常生產(chǎn)時(shí),因變頻器故障而帶來(lái)的停產(chǎn)。最終設(shè)計(jì)單位確定了四臺(tái)電動(dòng)機(jī)采用“一拖四”控制方式。轉(zhuǎn)爐傾動(dòng)主回路如圖4所示。
3.3轉(zhuǎn)爐傾動(dòng)變頻控制特點(diǎn)
(1)再生能量的處理:對(duì)于轉(zhuǎn)爐傾動(dòng)這種負(fù)載,變頻器選用的最重要原則之一是:所選變頻器必須具有在滿載或過(guò)載時(shí)輸出轉(zhuǎn)矩恒定的高性能變頻器,以保證轉(zhuǎn)爐生產(chǎn)的安全性。另外要具有再生發(fā)電制動(dòng)功能。為了保證轉(zhuǎn)爐生產(chǎn)的連續(xù)性,采用傳統(tǒng)的制動(dòng)單元和制動(dòng)電阻,而不采用回饋單元,處理電機(jī)的再生發(fā)電。
(2)開(kāi)抱閘的控制:轉(zhuǎn)爐傾動(dòng)在控制過(guò)程中,應(yīng)防止出現(xiàn)“溜車(chē)”故障。利用PLC控制程序,使抱閘在系統(tǒng)起動(dòng)后電機(jī)轉(zhuǎn)矩建立到足夠大時(shí)松開(kāi),大大提高了系統(tǒng)應(yīng)用的可靠性。
3.4轉(zhuǎn)爐傾動(dòng)控制系統(tǒng)操作
(1)三地操作:根據(jù)煉鋼工藝的要求,轉(zhuǎn)爐傾動(dòng)需三地控制,分別是主控室主操作臺(tái)控制、轉(zhuǎn)爐爐前操作臺(tái)控制、轉(zhuǎn)爐爐后操作臺(tái)控制。主控室主操作臺(tái)控制:在主控室通過(guò)主操作臺(tái)上的按鈕及搖爐主令控制器可對(duì)轉(zhuǎn)爐進(jìn)行搖爐、加料、出料及其它所有的操作均能在主控室主操作臺(tái)上進(jìn)行。轉(zhuǎn)爐爐前、爐后操作臺(tái)控制:主要是在出料出渣及轉(zhuǎn)爐維護(hù)時(shí)現(xiàn)場(chǎng)工人使用,由于在主控室只能看到轉(zhuǎn)爐的一個(gè)正面,在出料出渣時(shí)無(wú)法看到出料的多少,這樣只能借助于現(xiàn)場(chǎng)爐前爐后操作臺(tái)工人的現(xiàn)場(chǎng)操作。
(2)開(kāi)停機(jī)及速度給定——傾動(dòng)搖爐主令控制器
開(kāi)停機(jī)及速度給定控制由傾動(dòng)搖爐主令控制器給出,現(xiàn)主令控制器選用TE公司生產(chǎn)的XDA-V11122型。XDA-V11122型主令控制器與PLC之間進(jìn)行電壓模擬量輸入,電壓范圍為-10V~+10V。當(dāng)輸入電壓-10V~0V時(shí),電機(jī)反轉(zhuǎn);當(dāng)輸入電壓0V~+10V時(shí),電機(jī)正轉(zhuǎn)。在PLC程序中,將-10V~+l0V的范圍對(duì)應(yīng)劃分為-27648~+27648數(shù)字范圍。當(dāng)輸入在-27648~-300時(shí),電機(jī)反轉(zhuǎn);在300~27648時(shí),電機(jī)正轉(zhuǎn);在-300~+300時(shí),電機(jī)不動(dòng),防止控制器漂移而發(fā)生誤動(dòng)。
4山東某鋼鐵集團(tuán)50T轉(zhuǎn)爐工藝參數(shù)
該鋼鐵集團(tuán)50T轉(zhuǎn)爐工程為新建項(xiàng)目,采用了當(dāng)時(shí)國(guó)內(nèi)外先進(jìn)的控制工藝、控制技術(shù),項(xiàng)目于2003年7月一次性投運(yùn)成功。該轉(zhuǎn)爐傾動(dòng)部分的主要工藝參數(shù)如下:
轉(zhuǎn)爐公稱(chēng)容量:50T
額定傾動(dòng)力矩:1000kN.m
最大事故力矩:2300kN.m
傾動(dòng)速度:0.2~1.0rpm
總傳動(dòng)比:563.08
傾動(dòng)電機(jī):YGP315M-8,45kW,電機(jī)為輥道用變頻調(diào)速三相異步電動(dòng)機(jī),定子Y接,H級(jí)絕緣,工作制S5(40%),cosΦ=0.76,額定電流85.9A,額定轉(zhuǎn)矩659.1N.m。
5JD-BP32系列變頻器產(chǎn)品特點(diǎn)
JD-BP32系列變頻器是山東新風(fēng)光電子科技發(fā)展有限公司采用全新理念自主開(kāi)發(fā)的一系列高性能,簡(jiǎn)易型、低噪音變頻器。在提高穩(wěn)定性的前提下增加了簡(jiǎn)易PLC、實(shí)用的PI調(diào)節(jié),靈活的輸入輸出端子、參數(shù)在線修改、自識(shí)別信號(hào)傳輸故障、停電和停機(jī)參數(shù)存儲(chǔ)、定長(zhǎng)控制、擺頻控制、RS485控制、現(xiàn)場(chǎng)總線控制等一系列實(shí)用先進(jìn)的運(yùn)行、控制功能。為設(shè)備制造和終端客戶提供了集成度高的一體化解決方案,對(duì)降低系統(tǒng)采購(gòu)和運(yùn)營(yíng)成本,提高系統(tǒng)可靠性具有極大的幫助。
JD-BP32系列變頻器產(chǎn)品技術(shù)參數(shù)如表2所示。
6具體調(diào)試過(guò)程
由于工藝需要需要經(jīng)常頻繁搖爐,再加上自身重量和爐內(nèi)料的重量達(dá)160噸左右,負(fù)載慣性大,為確保在任意位置不下滑,每臺(tái)電機(jī)的機(jī)械抱閘何時(shí)打開(kāi)、何時(shí)關(guān)閉是調(diào)試的關(guān)鍵。在實(shí)際調(diào)試過(guò)程中,經(jīng)過(guò)反復(fù)實(shí)驗(yàn),選擇四臺(tái)電動(dòng)機(jī)額定電流值之和的空載值(30~35%),此時(shí)電機(jī)已建立起足夠大的電磁轉(zhuǎn)矩,通過(guò)與PLC配合,制動(dòng)器可以打開(kāi)。這樣可以避免出現(xiàn)“溜車(chē)”現(xiàn)象。
由于轉(zhuǎn)爐變頻器是“一拖四”控制,所以變頻控制只能采用“V/F”控制,為了提高變頻器在低速的轉(zhuǎn)矩,啟動(dòng)時(shí)應(yīng)加上一個(gè)合適的提升電壓。
電壓提升參數(shù):P0.09=6%啟動(dòng)時(shí)電壓提升的數(shù)值。P0.10=10Hz轉(zhuǎn)矩提升截止頻率。變頻器主要調(diào)試參數(shù)如表3所示。
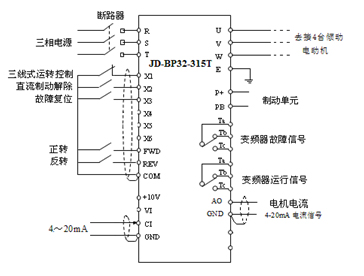
然后根據(jù)工藝要求,變頻器與PLC控制系統(tǒng)連接信號(hào)主要有:正轉(zhuǎn)運(yùn)行,反轉(zhuǎn)運(yùn)行,急停,復(fù)位,變頻器運(yùn)行信號(hào)(開(kāi)抱閘信號(hào))和變頻器故障信號(hào)。根據(jù)現(xiàn)場(chǎng)接線圖5示。
7現(xiàn)場(chǎng)使用情況
轉(zhuǎn)爐傾動(dòng)電機(jī)的具體控制過(guò)程如下:
(1)起動(dòng)過(guò)程
當(dāng)系統(tǒng)準(zhǔn)備運(yùn)行時(shí),變頻器主回路各開(kāi)關(guān)及接觸器接通,主令控制器將模擬量數(shù)值輸入PLC中,通過(guò)主令控制器輸入的正負(fù)值,PLC判斷變頻器正、反轉(zhuǎn),對(duì)主令控制器的輸入值取絕對(duì)值后作為變頻器的速度控制而輸出,變頻器無(wú)故障的情況下開(kāi)始運(yùn)行,開(kāi)閘信號(hào)(根據(jù)變頻器輸出電流是否到達(dá)所需的電機(jī)電流的幅值)由PLC給出,轉(zhuǎn)爐傾動(dòng)電機(jī)開(kāi)始轉(zhuǎn)動(dòng)且轉(zhuǎn)速上升至給定值。
(2)停車(chē)
當(dāng)主令控制器打到停機(jī)位后,PLC發(fā)出停車(chē)指令,變頻器封鎖輸出,抱閘關(guān)閉,轉(zhuǎn)爐傾動(dòng)停止轉(zhuǎn)動(dòng)。
(3)故障
當(dāng)變頻器發(fā)生故障后,其故障信號(hào)輸入PLC中,抱閘關(guān)閉,同時(shí)PLC發(fā)出報(bào)警。
8結(jié)束語(yǔ)
2003年7月1日,整個(gè)轉(zhuǎn)爐工程投入使用。相比于鋼廠內(nèi)其它轉(zhuǎn)爐傾動(dòng)直流調(diào)速控制,變頻調(diào)速具有維護(hù)費(fèi)用低,運(yùn)行時(shí)動(dòng)作響應(yīng)快,運(yùn)行平穩(wěn)等特點(diǎn),避免了溜車(chē)、鋼水外濺事故的發(fā)生。轉(zhuǎn)爐傾動(dòng)多年平穩(wěn)運(yùn)行,印證了調(diào)試風(fēng)光JD-BP32-T系列變頻器的方案是可行的。
標(biāo)簽:
![]()
中國(guó)傳動(dòng)網(wǎng)版權(quán)與免責(zé)聲明:凡本網(wǎng)注明[來(lái)源:中國(guó)傳動(dòng)網(wǎng)]的所有文字、圖片、音視和視頻文件,版權(quán)均為中國(guó)傳動(dòng)網(wǎng)(www.hysjfh.com)獨(dú)家所有。如需轉(zhuǎn)載請(qǐng)與0755-82949061聯(lián)系。任何媒體、網(wǎng)站或個(gè)人轉(zhuǎn)載使用時(shí)須注明來(lái)源“中國(guó)傳動(dòng)網(wǎng)”,違反者本網(wǎng)將追究其法律責(zé)任。
本網(wǎng)轉(zhuǎn)載并注明其他來(lái)源的稿件,均來(lái)自互聯(lián)網(wǎng)或業(yè)內(nèi)投稿人士,版權(quán)屬于原版權(quán)人。轉(zhuǎn)載請(qǐng)保留稿件來(lái)源及作者,禁止擅自篡改,違者自負(fù)版權(quán)法律責(zé)任。
產(chǎn)品新聞
更多>

2025-06-09

從外觀到內(nèi)核的「超進(jìn)化」!NK550M五軸...
2025-06-06

2025-05-19

2025-04-30

性能躍升20%!維宏NK300CX Plus數(shù)控系統(tǒng)...
2025-04-11
推薦專(zhuān)題
更多>網(wǎng)站簡(jiǎn)介|會(huì)員服務(wù)|聯(lián)系方式|幫助信息|版權(quán)信息|網(wǎng)站地圖|友情鏈接|法律支持|意見(jiàn)反饋|sitemap
傳動(dòng)網(wǎng)-工業(yè)自動(dòng)化與智能制造的全媒體“互聯(lián)網(wǎng)+”創(chuàng)新服務(wù)平臺(tái)
 網(wǎng)站客服服務(wù)咨詢采購(gòu)咨詢媒體合作
網(wǎng)站客服服務(wù)咨詢采購(gòu)咨詢媒體合作
Chuandong.com Copyright ?2005 - 2025 ,All Rights Reserved 深圳市奧美大唐廣告有限公司 版權(quán)所有 粵ICP備 14004826號(hào) | 營(yíng)業(yè)執(zhí)照證書(shū) | 不良信息舉報(bào)中心 |  粵公網(wǎng)安備 44030402000946號(hào)
粵公網(wǎng)安備 44030402000946號(hào)











