首é |資訊|產å“|ä¼æ¥|å“牌|商機|技術|專題|è¦–é »|展會|媒體|論壇|下載

 您ç¾åœ¨çš„ä½ç½®ï¼š
ä¸åœ‹å‚³å‹•ç¶²
>
æŠ€è¡“é »é“
>
技術百科
>
æ·ºæžæ™ºèƒ½æ©Ÿå™¨äººçš„迷宮車控制系統如何工作?
您ç¾åœ¨çš„ä½ç½®ï¼š
ä¸åœ‹å‚³å‹•ç¶²
>
æŠ€è¡“é »é“
>
技術百科
>
æ·ºæžæ™ºèƒ½æ©Ÿå™¨äººçš„迷宮車控制系統如何工作?
時間:2018-01-08 10:54:33來æºï¼šç¶²çµ¡è½‰è¼‰
機器人在è»äº‹åµå¯Ÿã€æŽƒé›·æŽ’險ã€é˜²æ ¸åŒ–污染ç‰å±éšªèˆ‡æƒ¡åŠ£ç’°å¢ƒä¸ä»¥åŠå·¥æ¥è‡ªå‹•åŒ–生產的物料æ¬é‹ä¸Šæ‡‰ç”¨å¾ˆå»£ï¼Œéš¨è‘—ä»»å‹™å¾©é›œæ€§çš„å¢žåŠ ï¼Œå°ç§»å‹•æ©Ÿå™¨äººçš„è¦æ±‚也越來越智能化。然而,功能較完備的路徑跟蹤控制方法普é具有計算復雜,ä¸æ˜“實ç¾ç‰ç‰¹é»žã€‚主è¦é‡å°ç§»å‹•æ©Ÿå™¨äººå³æ™ºèƒ½å°è»Šçš„行走系統進行è¨è¨ˆï¼Œä»¥MCS-51å–®ç‰‡æ©Ÿç‚ºæŽ§åˆ¶æ ¸å¿ƒçš„æ™ºèƒ½å°è»Šåˆ©ç”¨å–®å…‰æŸåå°„å–樣紅外傳感器,探測æ£å‰æ–¹åŠå·¦å³å…©å´éšœç¤™ç‰©ï¼Œåˆ©ç”¨æŽ§åˆ¶ç®—法尋找行進路線,在無人控制的情æ³ä¸‹è‡ªä¸»åœ°èµ°å‡ºè¿·å®®ã€‚è¨è¨ˆé‡‡ç”¨äº†è¼ªå¼ç§»å‹•æ©Ÿæ§‹ï¼Œä½¿æ©Ÿå™¨äººèƒ½ç›´ç·šè¡Œèµ°ã€å·¦å³è½‰å½Žã€ä¸»è¦é‡å°è·¯å¾‘跟蹤算法優化å•é¡Œï¼Œæ出一種有效å¯è¡Œçš„方法,該法比以往算法更簡單易行。
機器人應當具有幾個特å¾ï¼šç§»å‹•åŠŸèƒ½ï¼ŒåŸ·è¡ŒåŠŸèƒ½ã€æ„Ÿè¦ºå’Œæ™ºèƒ½ã€‚ç›®å‰å…¨ä¸–ç•Œå„國舉辦的涉åŠç¡¬ä»¶ï¼Œè»Ÿä»¶ä»¿çœŸçš„機器人大賽ä¸ä¸‹20余類。å„種å„樣的機器人比賽都有一個共åŒçš„宗旨:培養科å¸å‰µæ–°ç²¾ç¥žï¼Œæ¿€ç™¼æ€ç¶çš„想象力,鼓勵ç†è«–與實è¸çš„çµåˆã€‚ä¸åƒ…如æ¤ï¼Œç¾åœ¨å·²ç¶“有越來越多的自動控制產å“已經介入生產,在農æ¥ã€å·¥æ¥ä¸Šéƒ½æœ‰å»£æ³›çš„應用。新的工作方å¼å°‡å¤§å¤§çš„縮çŸäº†äººå·¥ä½œæ¥çš„æ™‚é–“ï¼Œå¹¶ä¸”æ¸›è¼•äº†äººçš„é«”åŠ›å‹žå‹•çš„æ”¯å‡ºã€‚èµ°è¿·å®®çš„å¾®åž‹æ©Ÿå™¨é¼ ä¸»è¦æ˜¯åŸºäºŽè‡ªå‹•å¼•å°Žå°è»Š(AutoGuidedVehicle,AGV)的原ç†ï¼Œå¯¦ç¾æ©Ÿå™¨é¼ è˜åˆ¥è·¯ç·šï¼Œåˆ¤æ–·å¹¶è‡ªå‹•èº²é¿éšœç¤™ï¼Œé¸æ“‡æ£ç¢ºçš„行進路線走出迷宮。在æ¤é¸æ“‡åˆ¶ä½œä¸€å€‹ç°¡æ˜“的行進è£ç½®ï¼Œä½¿å…¶èƒ½é †åˆ©çš„èµ°é¿éšœæˆ–是迷宮。為了實ç¾å°è»Šè˜åˆ¥è·¯ç·šï¼Œåˆ¤æ–·å¹¶è‡ªå‹•èº²é¿éšœç¤™ï¼Œé¸æ“‡æ£ç¢ºçš„行進路線,障礙判斷采用單光æŸåå°„å–樣紅外傳感器,驅動電機采用直æµé›»æ©Ÿï¼ŒæŽ§åˆ¶æ ¸å¿ƒé‡‡ç”¨MCS-51單片機。控制上采用分時復用技術,僅用一塊單片機實ç¾äº†ä¿¡è™Ÿé‡‡é›†ã€ç·šè·¯åˆ¤æ–·ã€é›»æ©ŸæŽ§åˆ¶ç‰åŠŸèƒ½ã€‚迷宮由16×16個å€çµ„æˆã€‚起點è¨åœ¨æ‹è§’處,終點è¨åœ¨ä¸å¤®ï¼Œå 4個å€ã€‚æ¯å€‹å€ç‚º180mm×180mm大å°ï¼Œé–“å£é«˜ç‚º50mm,厚度為12mm,å´é¢æ¶‚白色,底é¢æ¶‚黑色,如圖1所示。
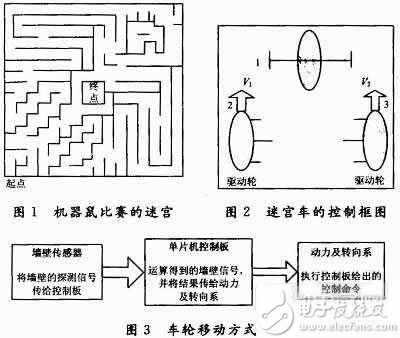
1迷宮車控制系統的總體è¨è¨ˆæ–¹æ¡ˆ
迷宮車由墻å£å‚³æ„Ÿå™¨ã€å–®ç‰‡æ©ŸæŽ§åˆ¶æ¿ã€å‹•åŠ›åŠè½‰å‘系組æˆçš„,控制框圖如圖2所示。
迷宮車采用輪å¼ç§»å‹•æ–¹å¼ã€‚優點是:çµæ§‹å’ŒæŽ§åˆ¶ç°¡å–®è€Œä¸”技術æˆç†Ÿã€‚從é¸å®šé›»å‹•æ©Ÿè½‰é€Ÿå’Œè¼ªèƒŽç›´å¾‘,å¯ä»¥ç°¡å–®åœ°è¨ˆç®—出å°è»Šçš„速度。但是,有關路é¢çš„阻力或上å¡çš„驅動轉矩ç‰æˆç‚ºé‡è¦çš„å› ç´ ã€‚è€ƒæ…®é€™é»žï¼Œåœ¨è¼ªèƒŽä¸Šä½¿ç”¨ç„¡ç·šé™æŽ§è»Šçš„å¡‘è† è¼ªèƒŽã€‚å¦‚åœ–3所示,å‰è¼ª1為è¬å‘腳輪或çƒå½¢è¼ªï¼ŒåŽè¼ª2å’ŒåŽè¼ª3為ç¨ç«‹é©…動輪,利用它們的轉速差實ç¾è½‰å‘。這種組åˆçš„特點是機樞組åˆå®¹æ˜“,而且當2個驅動輪以相åŒé€Ÿåº¦ã€ç›¸åæ–¹å‘轉動時車體能繞2個驅動輪連線的ä¸é»žè‡ªè½‰ï¼Œå€¼å¾—注æ„的是自轉ä¸å¿ƒèˆ‡è»Šé«”ä¸å¿ƒä¸ä¸€è‡´ã€‚
迷宮車車身æ料的é¸æ“‡ã€‚迷宮車使用的æ料大部分用于çµæ§‹ï¼Œä¸€èˆ¬æ‡‰é‡‡ç”¨é‡‘屬æ料。迷宮車承載和é‹å‹•ä¸æ‡‰ç”¢ç”Ÿåš´é‡çš„變形和斷裂,從力å¸è§’度講å³å…·æœ‰è¶³å¤ çš„å¼·åº¦ã€‚è¿·å®®è»Šè² è¼‰å°ï¼Œè‡ªé‡è¼•ï¼Œå°å£½å‘½çš„è¦æ±‚ä¸é«˜ã€‚å› æ¤ï¼Œé¸ç”¨éµçš®ã€‚
1.1迷宮車控制電路的è¨è¨ˆ
控制電路主è¦ç”±é›»æ©Ÿé©…動電路,單片機接å£é›»è·¯ï¼Œé›»æºé›»è·¯å’Œå‚³æ„Ÿå™¨é›»è·¯çµ„æˆã€‚控制框圖如圖4所示。
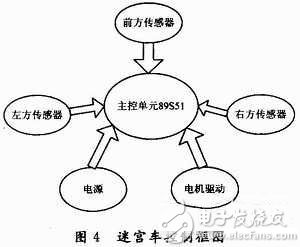
(1)紅外線光感電路傳感器通éŽç™¼å…‰äºŒæ¥µç®¡ç™¼å‡ºç´…外線,若有障礙物在å‰æ–¹ï¼Œç´…外線會被å射回來,被感光三極管接收,單片機程åºå°ä¿¡è™Ÿé€²è¡Œæ¯”較處ç†ï¼ŒæŒ‰è¨å®šçš„動作è¦æ±‚å‘åŽè¼ªçš„兩個電機發出控制命令,控制å°è»Šè¡Œé€²ã€‚
(2)電機驅動電路采用89S51單片機,通éŽL293D芯片來控制兩個驅動電機動作。89S51æ ¹æ“šç´…å¤–å‚³æ„Ÿå™¨å°å¤–界進行探測åŽå饋回來的信號,ä¾æ“šè¿·å®®è»ŠæŽ¢è·¯ç®—法,判定迷宮車行進方å‘,分別å‘å·¦å³å…©å€‹é©…動電機發出控制指令,該信號經L293D芯片驅動åŽï¼Œç›´æŽ¥æŽ§åˆ¶ç›¸æ‡‰é›»æ©Ÿå‹•ä½œï¼Œä½¿è¿·å®®è»ŠæŒ‰æ—¢å®šå‹•ä½œé€²è¡Œå‰é€²ã€åŽé€€ã€è½‰å‘。
標簽:
![]()
ä¸Šä¸€ç¯‡ï¼šé«˜å£“è®Šé »å™¨æ‡‰ç”¨åœ¨å¾ªç’°æµåŒ–床...
ä¸‹ä¸€ç¯‡ï¼šæ–°åž‹é«˜å£“è®Šé »å™¨åœ¨åŒæ¥é›»å‹•æ©Ÿ...
ä¸åœ‹å‚³å‹•ç¶²ç‰ˆæ¬Šèˆ‡å…責è²æ˜Žï¼šå‡¡æœ¬ç¶²æ³¨æ˜Ž[來æºï¼šä¸åœ‹å‚³å‹•ç¶²]的所有文å—ã€åœ–片ã€éŸ³è¦–å’Œè¦–é »æ–‡ä»¶ï¼Œç‰ˆæ¬Šå‡ç‚ºä¸åœ‹å‚³å‹•ç¶²(www.hysjfh.com)ç¨å®¶æ‰€æœ‰ã€‚如需轉載請與0755-82949061è¯ç³»ã€‚任何媒體ã€ç¶²ç«™æˆ–å€‹äººè½‰è¼‰ä½¿ç”¨æ™‚é ˆæ³¨æ˜Žä¾†æºâ€œä¸åœ‹å‚³å‹•ç¶²â€ï¼Œé•å者本網將追究其法律責任。
本網轉載并注明其他來æºçš„稿件,å‡ä¾†è‡ªäº’è¯ç¶²æˆ–æ¥å…§æŠ•ç¨¿äººå£«ï¼Œç‰ˆæ¬Šå±¬äºŽåŽŸç‰ˆæ¬Šäººã€‚轉載請ä¿ç•™ç¨¿ä»¶ä¾†æºåŠä½œè€…,ç¦æ¢æ“…自篡改,é•è€…è‡ªè² ç‰ˆæ¬Šæ³•å¾‹è²¬ä»»ã€‚
相關資訊
網站簡介|會員æœå‹™|è¯ç³»æ–¹å¼|幫助信æ¯|版權信æ¯|網站地圖|å‹æƒ…éˆæŽ¥|法律支æŒ|æ„見å饋|sitemap
傳動網-å·¥æ¥è‡ªå‹•åŒ–èˆ‡æ™ºèƒ½åˆ¶é€ çš„å…¨åª’é«”â€œäº’è¯ç¶²+â€å‰µæ–°æœå‹™å¹³è‡º
 網站客æœæœå‹™å’¨è©¢é‡‡è³¼å’¨è©¢åª’é«”åˆä½œ
網站客æœæœå‹™å’¨è©¢é‡‡è³¼å’¨è©¢åª’é«”åˆä½œ
Chuandong.com Copyright ?2005 - 2025 ,All Rights Reserved 深圳市奧美大å”廣告有é™å…¬å¸ 版權所有
ç²µICPå‚™ 14004826號 | 營æ¥åŸ·ç…§è‰æ›¸ | ä¸è‰¯ä¿¡æ¯èˆ‰å ±ä¸å¿ƒ |  粵公網安備 44030402000946號
粵公網安備 44030402000946號















