 ƒ˙¨F(xi®§n)‘⁄µƒŒª÷√£∫
÷–á¯Ç˜Ñ”æW(w®£ng)
>
ºº–g(sh®¥)Ólµ¿
>
ë™(y®©ng)”√∑Ω∞∏
>
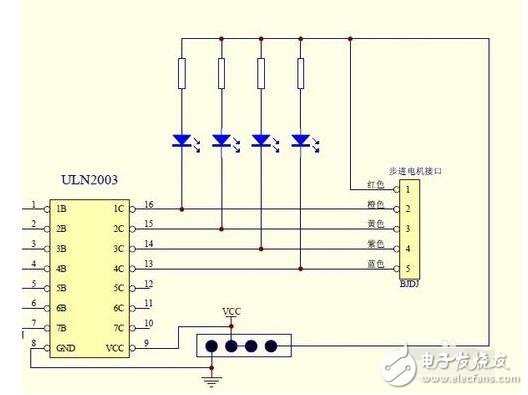
ULN2003»Á∫ŒÚå(q®±)Ñ”5V≤ΩþMÎäôC
ƒ˙¨F(xi®§n)‘⁄µƒŒª÷√£∫
÷–á¯Ç˜Ñ”æW(w®£ng)
>
ºº–g(sh®¥)Ólµ¿
>
ë™(y®©ng)”√∑Ω∞∏
>
ULN2003»Á∫ŒÚå(q®±)Ñ”5V≤ΩþMÎäôC
ïrÈg£∫2018-01-02 11:37:17ÅÌ‘¥£∫æW(w®£ng)Ωj(lu®∞)ÞD(zhu®£n)ðd
ULN2003 «“ªÇÄ∑«ÈTÎä¬∑£¨∞¸∫¨7ÇÄÜŒ‘™£¨∏˜∂˛òOπеƒ’˝òO∑÷ÑeΩ”∏˜þ_¡÷ÓDπеƒºØÎäòO°£”√”⁄∏––‘ÿìðdïr£¨‘ìƒ_Ω”ÿìðdÎä‘¥’˝òO£¨∆¿m(x®¥)¡˜◊˜”√£®‘⁄∏––‘ÿìðd÷–£¨Îä¬∑îýÈ_∫Ûï˛Æa(ch®£n)…˙∫Ð¥Ûµƒ∑¥ÎäÑ”Ñð£¨ûÈ∑¿÷πìpâƒþ_¡÷ÓDπУ¨Ω”∑¥œýµƒ∂˛òOπÐÅÌòã(g®∞u)≥…Õ®¬∑£¨ π÷ÆÞD(zhu®£n)ìQûÈÎ䡘£©°£
≤ΩþMÎäôC «å¢Îä√}õ_–≈ÃñÞD(zhu®£n)◊É?y®≠u)ÈΩ«Œª“∆ªÚæÄŒª“∆µƒÈ_≠h(hu®¢n)øÿ÷∆ÎäôC£¨ «¨F(xi®§n)¥˙îµ(sh®¥)◊÷≥ÖÚøÿ÷∆œµΩy(t®Øng)÷–µƒ÷˜“™àÃ(zh®™)––‘™º˛£¨ë™(y®©ng)”√òOûÈèV∑∫°£‘⁄∑«≥¨ðdµƒ«Èõrœ¬£¨ÎäôCµƒÞD(zhu®£n)ÀŸ°¢Õ£÷πµƒŒª÷√÷ª»°õQ”⁄√}õ_–≈ÃñµƒÓl¬ ∫Õ√}õ_îµ(sh®¥)£¨∂¯≤ª Ðÿìðd◊ɪصƒ”∞Ì루Æî≤ΩþMÚå(q®±)Ñ”∆˜Ω” ’µΩ“ªÇÄ√}õ_–≈Ãñ£¨À¸æÕÚå(q®±)Ñ”≤ΩþMÎäôC∞¥‘O(sh®®)∂®µƒ∑ΩœÚÞD(zhu®£n)Ñ”“ªÇÄπÃ∂®µƒΩ«∂»£¨∑QûÈ°∞≤ΩæýΩ«°±£¨À¸µƒ–˝ÞD(zhu®£n) «“‘πÃ∂®µƒΩ«∂»“ª≤Ω“ª≤Ωþ\––µƒ°£ø…“‘Õ®þ^øÿ÷∆√}õ_ÇÄîµ(sh®¥)ÅÌøÿ÷∆Ω«Œª“∆¡ø£¨èƒ∂¯þ_µΩú ¥_∂®Œªµƒƒøµƒ£ªÕ¨ïrø…“‘Õ®þ^øÿ÷∆√}õ_Ól¬ ÅÌøÿ÷∆ÎäôCÞD(zhu®£n)Ñ”µƒÀŸ∂»∫Õº”ÀŸ∂»£¨èƒ∂¯þ_µΩ’{(di®§o)ÀŸµƒƒøµƒ°£
ULN2003»Á∫ŒÚå(q®±)Ñ”5V≤ΩþMÎäôC
µ⁄“ª≤ΩþMÎäôC–Ë“™µƒÚå(q®±)Ñ”Î䡘∫Ð¥Û£¨“Ú¥À÷±Ω” π”√ÜŒ∆¨ôCÕ˘Õ˘πЃ_Î䡘≤ªâÚ£¨º”…œ“ª∞„3.3VµƒÜŒ∆¨ôC“≤üo∑®Úå(q®±)Ñ”5Vµƒ≤ΩþMÎäôC£¨“Ú¥À–Ë“™Îä¬∑ÞD(zhu®£n)ìQ°£”√µƒULN2003–æ∆¨Úå(q®±)Ñ”≤ΩþMÎäôC°£ULN2003æÕ «∆µΩ¡ÀÎ䡘∑≈¥Û◊˜”√£¨“≤ πµ√Úå(q®±)Ñ”Îäâ∫◊É≥…¡À5V°£≥˝¡À”√ULN2003“≤ø…“‘◊‘º∫”√»˝òOπÐ¥ÓΩ®Îä¬∑£¨‘≠¿Ì≈cULN2003É»(n®®i)≤øΩY(ji®¶)òã(g®∞u)ÓêÀ∆°£
“≤æÕ «≤ΩþMÎäôC“™þ\ÞD(zhu®£n)ïr£¨»Á∫ŒΩo√}õ_£¨◊åÎäôCþB¿m(x®¥)þ\Ñ”°£ps£∫»Áπ˚ΩoÂe√}õ_ø…ƒÐ◊ÛÞD(zhu®£n)é◊œ¬”÷ÞD(zhu®£n)ªÿÅÌ°£œ¬àDæÕ «–°æéÎäôCµƒœý–Ú°£
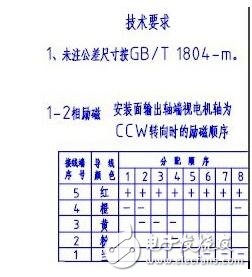
œ¬√Ê «’˝ÞD(zhu®£n)∑≠ÞD(zhu®£n)µƒæé¥a∏˘ì˛(j®¥)ºº–g(sh®¥)“™«Û°£»ÁàD”√µƒÜŒÎp∞À≈ƒ°£
unsignedcharF_RotaTIon£€8£ð={0x08£¨0x0c£¨0x04£¨0x06£¨0x02£¨0x03£¨0x01£¨0x09};//FAN
unsignedcharB_RotaTIon£€8£ð={0x09£¨0x01£¨0x03£¨0x02£¨0x06£¨0x04£¨0x0c£¨0x08};//ZHENG
¥À∫Øîµ(sh®¥)É…ÇÄÖ¢îµ(sh®¥)£¨µ⁄“ªÇÄÖ¢îµ(sh®¥) «»¶îµ(sh®¥)°£µ⁄∂˛ÇÄÖ¢îµ(sh®¥) «∑ΩœÚ“≤æÕ «þxìÒ’˝ÞD(zhu®£n)∫Õ∑≠ÞD(zhu®£n)
voidmotorNCircle£®intn£¨boolposiTIon£©
{
inti=0;
intj=0;
intk=0;
for£®j=0;j°∂n;j++£©
{
for£®i=0;i°∂64*8;i++£©
{
for£®k=0;k°∂8;k++£©
{
if£®TRUE==posiTIon£©
SetMotor£®F_Rotation£€k£ð£©;
else
SetMotor£®B_Rotation£€k£ð£©;
Delay£®20000£©;
}
}
}
}
œ¬√ÊæÕ «SetMotor∫Øîµ(sh®¥)£¨∏˘ì˛(j®¥)ǘµƒîµ(sh®¥)ì˛(j®¥)≤ªÕ¨£¨øÿ÷∆µƒ4ÇÄIOpinðî≥ˆ≤ªÕ¨°£
voidSetMotor£®unsignedcharInputData£©
{
if£®InputData&0x08£©
{
GPIO_ResetBits£®GPIOC£¨GPIO_Pin_6£©;
}
else
{
GPIO_SetBits£®GPIOC£¨GPIO_Pin_6£©;
}
if£®InputData&0x04£©
{
GPIO_ResetBits£®GPIOC£¨GPIO_Pin_7£©;
}
else
{
GPIO_SetBits£®GPIOC£¨GPIO_Pin_7£©;
}
if£®InputData&0x02£©
{
GPIO_ResetBits£®GPIOC£¨GPIO_Pin_8£©;
}
else
{
GPIO_SetBits£®GPIOC£¨GPIO_Pin_8£©;
}
if£®InputData&0x01£©
{
GPIO_ResetBits£®GPIOC£¨GPIO_Pin_9£©;
}
else
{
GPIO_SetBits£®GPIOC£¨GPIO_Pin_9£©;
}
}

“‘28BYJ-48ûÈ¿˝£¨∏˘ì˛(j®¥)ºº–g(sh®¥)ŸY¡œ£¨≤ΩæýµƒΩ«∂»ûÈ5.625-64∂¯«“?gu®©)ß”–úpÀŸ˝XðÜ «1£∫64“Ú¥ÀÞD(zhu®£n)64≥À64ÇÄ√}õ_≤≈ «1»¶°£“Ú¥À“ªÇÄ√}õ_ÞD(zhu®£n)þ^5.625≥˝64=0.08789∂»°£
À˘“‘”–¡Àœ¬√ʵƒ—≠≠h(hu®¢n)°£
for£®j=0;j°∂n;j++£©
{
for£®i=0;i°∂64*8;i++£©//64*8
{
for£®k=0;k°∂8;k++£©//4œýÜŒÎp8≈ƒ
{
if£®TRUE==position£©
SetMotor£®F_Rotation£€k£ð£©;
else
SetMotor£®B_Rotation£€k£ð£©;
Delay£®20000£©;//◊¢“‚þ@ÇÄ—”ïr◊‘º∫»•’{(di®§o)πù(ji®¶)°£
}
}
òÀ∫û£∫
![]()
…œ“ª∆™£∫DSP∫ÕCANøÇæÄë™(y®©ng)”√‘⁄÷±¡˜ÎäôC...
œ¬“ª∆™£∫uln2003Úå(q®±)Ñ”≤ΩþMÎäôC‘≠¿Ì∑÷Œˆ
÷–á¯Ç˜Ñ”æW(w®£ng)∞Êôý(qu®¢n)≈c√‚ÿü¬ï√˜£∫∑≤±ææW(w®£ng)◊¢√˜[ÅÌ‘¥£∫÷–á¯Ç˜Ñ”æW(w®£ng)]µƒÀ˘”–Œƒ◊÷°¢àD∆¨°¢“Ù“ï∫Õ“ïÓlŒƒº˛£¨∞Êôý(qu®¢n)æ˘ûÈ÷–á¯Ç˜Ñ”æW(w®£ng)(www.hysjfh.com)™öº“À˘”–°£»Á–ËÞD(zhu®£n)ðd’à≈c0755-82949061¬ì(li®¢n)œµ°£»Œ∫Œ√ΩÛw°¢æW(w®£ng)’æªÚÇÄ»ÀÞD(zhu®£n)ðd π”√ïrÌö◊¢√˜ÅÌ‘¥°∞÷–á¯Ç˜Ñ”æW(w®£ng)°±£¨þ`∑¥’þ±ææW(w®£ng)å¢◊∑æø∆‰∑®¬…ÿü»Œ°£
±ææW(w®£ng)ÞD(zhu®£n)ðd≤¢◊¢√˜∆‰À˚ÅÌ‘¥µƒ∏º˛£¨æ˘ÅÌ◊‘ª•¬ì(li®¢n)æW(w®£ng)ªÚòI(y®®)É»(n®®i)Õ∂∏»À ø£¨∞Êôý(qu®¢n)埔⁄‘≠∞Êôý(qu®¢n)»À°£ÞD(zhu®£n)ðd’à±£¡Ù∏º˛ÅÌ‘¥º∞◊˜’þ£¨Ω˚÷π…√◊‘¥€∏ƒ£¨þ`’þ◊‘ÿì∞Êôý(qu®¢n)∑®¬…ÿü»Œ°£
œýÍP(gu®°n)ŸY”ç
Æa(ch®£n)∆∑–¬¬Ñ
∏¸∂ý>

∞Â≤ƒ¿ÀŸM≥…öv ∑£øæS∫Í÷«ƒø◊å”ý¡œ°∞◊ÉèU...
2025-06-09


πЫ–∏þ–ߺ”π§√ÿºÆ£∫–°πÐÃ◊¡œ+Tekla≤º˛...
2025-05-19

B1œµ¡–√}õ_–ÕÀ≈∑˛π§Àá∂Œπ¶ƒÐ…œæÄ£¨◊åôC...
2025-04-30

Õ∆À]å£Ó}
∏¸∂ý>æW(w®£ng)’æ∫ÜΩÈ|ï˛ÜT∑˛Ñ’(w®¥)|¬ì(li®¢n)œµ∑Ω Ω|éÕ÷˙–≈œ¢|∞Êôý(qu®¢n)–≈œ¢|æW(w®£ng)’æµÿàD|”—«ÈÊúΩ”|∑®¬…÷ß≥÷|“‚“ä∑¥Å|sitemap
ǘєæW(w®£ng)-π§òI(y®®)◊‘Ñ”ªØ≈c÷«ƒÐ÷∆‘ϵƒ»´√ΩÛw°∞ª•¬ì(li®¢n)æW(w®£ng)+°±Ñì(chu®§ng)–¬∑˛Ñ’(w®¥)∆Ω≈_
 æW(w®£ng)’æøÕ∑˛∑˛Ñ’(w®¥)◊…‘É≤…Ÿè◊…‘É√ΩÛw∫œ◊˜
æW(w®£ng)’æøÕ∑˛∑˛Ñ’(w®¥)◊…‘É≤…Ÿè◊…‘É√ΩÛw∫œ◊˜
Chuandong.com Copyright ?2005 - 2025 £¨All Rights Reserved …Ó€⁄ –äW√¿¥ÛÃ∆èV∏Ê”–œÞπ´Àæ ∞Êôý(qu®¢n)À˘”– ªõICPlj 14004826Ãñ | ÝIòI(y®®)àÃ(zh®™)’’◊Cï¯ | ≤ª¡º–≈œ¢≈eàÛ÷––ƒ |  ªõπ´æW(w®£ng)∞≤lj 44030402000946Ãñ
ªõπ´æW(w®£ng)∞≤lj 44030402000946Ãñ










