時間:2018-01-02 10:51:05來源:網絡轉載
無刷直流電機因無勵磁繞組,無換向器、無電刷、無滑環,使其結構比一般傳統的交、直流電動機來得簡單,運行較為可靠,維護較為簡單。與鼠籠型感應電動機相比較,其結構的簡單程度和運行的可靠性大體相當。由于沒有勵磁鐵耗和銅耗,功率在300W以下時,其效率比同規格的用電流勵磁的電機高10%~20%;和感應電動機相比,效率更高。
無刷直流電機一般采用方波驅動,采用霍爾傳感器獲得轉子位置,通過此信號強制換相.這種方案控制方法簡單,成本低,在目前電動車方案中應用廣泛.但由于方波驅動換相時會出現電流突變,導致轉矩脈動較大,因此噪聲指標差,難以在家電應用領域推廣.而正弦驅動可以避免換相時的電流突變,雖然最大轉矩會降低,但在噪聲指標上有明顯的優勢.
通常永磁同步電機http://bbsic.big-bit.com/的控制都采用DSP,并且電機需要提供光電編碼盤來精確檢測轉子位置,可以實現高精度控制,甚至可用在伺服系統中,但成本會很高,家電應用對價格非常敏感,而且有些應用對性能要求不高,比如電風扇,傳統的DSP矢量控制正弦驅動高成本方案也比較難推廣.因此本文提出的采用8位單片機集成PWM發生器的正弦驅動方案有較高的市場價值.
一般正弦驅動直流無刷電機的氣隙磁場是正弦波(也稱為永磁同步電機)或是正弦波注入高次諧波后的磁場波形,定子多采用分布繞組,因此反電動勢也是正弦波。三路霍爾傳感器安裝在轉子上,每隔60°電角度輸出變化一次,以此作為正弦波的同步信號,保證沒有累積誤差.
二、硬件結構
本方案的核心是一顆集成PWM發生器的8位單片機SH79F168,采用優化的單機器周期8051內核,內置16kFlash存儲器,兼容傳統8051所有硬件資源,采用JTAG仿真方式,內置16.6MHz振蕩器,同時擴展了如下功能:
?雙DPTR指針.16位x8乘法器和16位/8除法器.
?3通道12位帶死區控制PWM,6路輸出,輸出極性可設,中心和邊沿對齊模式
?集成故障檢測功能,可瞬時關閉PWM輸出.
?內置放大器和比較器,可用作電流放大采樣和過流保護.
?提供硬件抗干擾措施.
?提供Flash自編程功能,可以模擬用做EEROM,方便存儲參數.
主系統架構采用三相全控橋,自舉升壓驅動IC,控制地和功率地共享,采用IC內置放大器和ADC實現電流電壓采樣,節省電壓/電流互感器,同時利用IC內部集成的比較器和PWM故障檢測功能實現過流保護.
三、霍爾相序自動測定
不論使用何種控制方式,都必須先知道Hall信號與轉子位置的對應關系。Hall信號每60°電角度變化一次,共有6個值,以二極三相集中繞組為示意,如圖1,圖2所示。
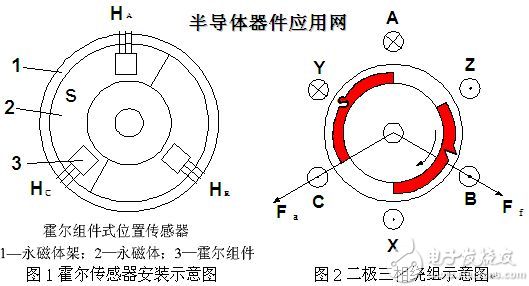
圖1中可以看到三個Hall傳感器在空間中依次相差120°電角度,轉子磁極寬度為180°,設Ha安裝在圖2的A繞組處,Hb在B繞組處,Hc在C繞組處。Hall在S極下輸出1(高阻輸出,外部上拉),N極下輸出0,則轉子順時針旋轉時,Hall信號的變化順序是101,001,011,010,110,100(MSB=Hc,LSB=Ha),每個Hall狀態保持60°電角度的時間。以轉子磁勢的位置來劃分Hall區域,如圖3所示。
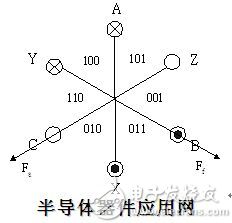
圖3Hall信號區域的劃分
可以看出Hall信號區域的劃分完全是由Hall傳感器的安裝位置決定的。二二方式通電時,如AB相通電,則定子磁勢Fa的位置如圖3所示,正好在110和010區域的分界處,此時若轉子磁勢Ff在圖標位置,則轉子將順時針轉過60°電角度,然后Hall信號的輸出變為010,這時必須立刻使AC相通電,使Fa指向圖4所示的位置,這樣就可以帶動轉子轉動。傳統的方波控制就是采用這種方式.
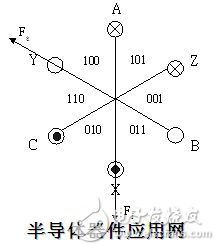
圖4轉子位置變化后相應定子磁勢位置
為了實現自動判別Hall輸出信號與轉子磁動勢的位置關系,常采用的辦法是將轉子固定在圖4的6個不同區域中,記錄下對應的Hall信號值。在圖4中,若持續給AC相通電(電流從A流入,C流出),則Fa會停在圖標的位置,而Ff最終也將停在Fa的位置,而這個位置正好在兩個不同的Hall信號區域之間,這樣就無法準確的測出Hall輸出信號與轉子磁動勢位置的對應關系。
本方案采用的方法是三相通電,先給AB,AC相通電,如圖5所示,定子磁動勢指向一個Hall區域的正中間,這樣轉子也將停在此位置,此時記錄下Hall的輸出。然后給AC,BC相通電,如圖6所示。
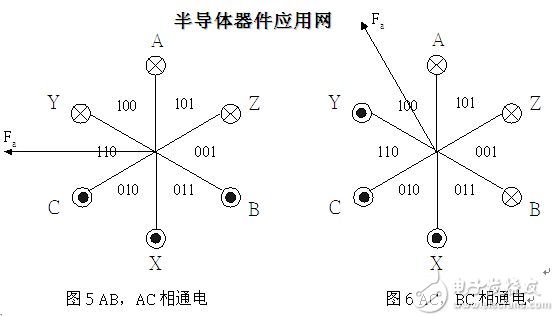
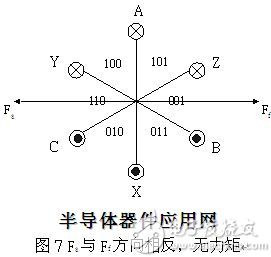
以此類推,接下來給BA,BC通電;BA,CA通電;CB,CA通電;AB,CB通電,分別記下相應的Hall值。有一點需要注意,最初給AB,AC通電時,若此時轉子磁動勢Ff的位置正好如圖7所示,則轉子將沒有力矩,無法轉到Fa的位置,出現死角,為了避免這種現象,采用正交驅動強制定位,在給AB,AC相通電之前先給BC兩相通電,就可以避免。
四、正弦波控制方式
得知Hall輸出信號與轉子磁動勢位置的關系之后,圖7中,Ff位于圖標的位置,方波驅動方式下,此時若給BC相通電,則Ff將逆時針旋轉,為了能夠讓Ff旋轉一周,此后的通電順序是BC-AC-AB-CB-CA-BA-BC……。反之,為了讓Ff順時針旋轉,通電的順序應該是CB-CA-BA-BC-AC-AB-CB……。
由電機基礎理論可知:
T=K*Fa*Ff*sinθ
式中K為常數,Ff為定子磁動勢,Fa為轉子磁動勢,θ為定子磁動勢和轉子磁動勢的夾角,明顯θ=90度時轉矩最大.方波控制以六步運行,θ在60°到120度之間變化,因此不是恒定轉矩,正弦波控制的目的就是控制定子磁鏈方向,盡量保持定子磁鏈方向和轉子磁鏈方向垂直.(這也就是DSP矢量控制追求的目標——定子磁鏈定向控制).這樣轉矩最大且恒定.
要想獲得上述效果,必須精確知道轉子位置,一般的做法是采用光電編碼盤,但成本較高,鑒于家電應用對動態性能要求不高,電機轉速不會突變,在60度電角度內可以認為電機勻速運行,因此本方案采用目前無刷電機標配的霍爾傳感器.
圖8中,一個360°電角度周期內電流按照t0到t6的順序變化。因此可以在程序中作出一個360度正弦波的表,每隔60度分段,通過讀取3路霍爾的當前值,軟件取不同的段,取出的數據和外部輸入的速度給定系數(0~1之間)相乘,然后送入PWM發生器的占空比寄存器,就可以復現一個完整的360度正弦波,按上述描述,不考慮電機的瞬態響應,兩次讀表的間隔時間根據以下方法確定:定時器紀錄電機轉子每轉過60度電角度所花費的時間,根據上兩次60度電角度轉子所花時間來預測下一個60度電角度需要多長時間.將此時間片除以60度表的數據量,就可以得知每次取表的間隔時間.
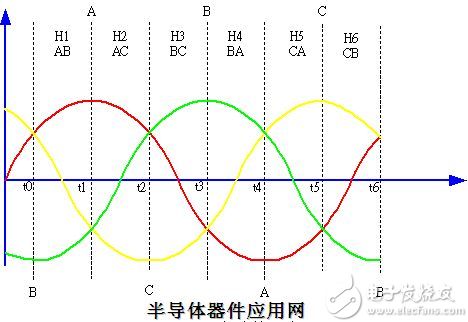
圖8三相電流示意圖
五、超前換相角處理
上述方案實現的是理想狀態下的電壓驅動波形,只是保證電壓矢量是和轉子磁勢方向基本垂直,實際上由于電機是感性負載,電機定子電流矢量滯后于定子電壓矢量,因此定子磁勢也滯后于定子電壓矢量,也就是說,如果按照上述SPWM波形驅動電機,定子磁勢和轉子磁勢夾角將小于90度,導致電機轉矩不是最大,定子電流存在直軸分量,產生去磁效應,導致控制器的功率因素不高,因此需要加入超前換相處理.以便定子磁勢和轉子磁勢夾角盡量接近90度.
實現起來其實很簡單,只要在做正弦表時,將初始角度超前就可以了,不需要更改軟件結構.更靈活一點的處理方法是給取表執針加一個偏移量,這樣可以根據負載狀況靈活設置超前換相角.
六、如何調速
從上文可以看出,SPWM的調制波頻率不是隨意給出的,而是根據Hall信號的變化隨時調整的,屬于自控式變頻,如果要調節電機速度,不能更改調制正弦波頻率,而是修改調制波幅度,因此軟件中取出的正弦表值會和外部的速度給定系數相乘后再寫入PWM發生器的占空比寄存器中,調制幅度修改后,電機上的等效電壓變化,然后速度發生變化,而正弦調制波的頻率則依據轉子霍爾信號被動調整.
七、總結
采用上述方案做成的控制器,實際運行效果比用方波控制噪聲小,轉動平滑,可實現無級調速,尤其適用于家用電風扇無刷電機控制或空調風扇控制。
標簽:
![]()
上一篇:大型風力發電機組齒輪傳動技...
下一篇:風力發電機組的增能新技術
中國傳動網版權與免責聲明:凡本網注明[來源:中國傳動網]的所有文字、圖片、音視和視頻文件,版權均為中國傳動網(www.hysjfh.com)獨家所有。如需轉載請與0755-82949061聯系。任何媒體、網站或個人轉載使用時須注明來源“中國傳動網”,違反者本網將追究其法律責任。
本網轉載并注明其他來源的稿件,均來自互聯網或業內投稿人士,版權屬于原版權人。轉載請保留稿件來源及作者,禁止擅自篡改,違者自負版權法律責任。
產品新聞
更多>
2025-06-16

2025-06-09

2025-06-06

2025-05-19

2025-04-30

2025-04-11












 網站客服
網站客服 粵公網安備 44030402000946號
粵公網安備 44030402000946號