時間:2017-12-26 11:20:07來源:網絡轉載
步進電機又稱為脈沖電動機,是數字控制系統中的一種執行元件其功用是將脈沖電信號變換為相應的角位移或直線位移反應式步進電動機在實際中應用較為廣泛,其結構與工作原理也也易于掌握,它在不同通電方式下,運行方式是不同的,我們可以據此改變其運行特性。
轉子由硅鋼片或電工純鐵棒等導磁體構成,轉子外表面為多齒結構(轉子的齒槽在轉動時產生磁阻變化故稱為變磁阻電機,簡稱VR,也稱反應式步進電機)。當定子線圈通電時,定子磁極磁化,吸引轉子齒而產生轉矩,使其移動一步。與永磁電機產生磁性吸引轉矩和排斥轉矩相比,VR型只產生吸引轉矩。
如下圖所示VR型變磁阻反應式步進電機的結構和工作原理。圖中的上圖,定子上均勻分布了12個磁極,每個磁極相距30°,相差90°(間隔三個槽)的四個線圈組成一相繞組。轉子齒數為8,當一相繞組通電時,其定子極吸引轉子齒,使氣隙磁阻最小達到靜止位置。
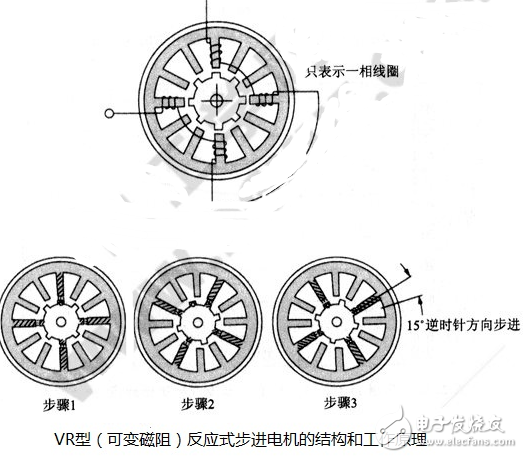
下面,從步驟1到步驟3來說明VR型變磁阻反應式步進電機的工作原理。
第一步:為第1相線圈的簡化圖,剖面線表示第1相定子激磁,轉子被第1相定子磁極吸引,轉子齒轉到定子磁極之下。
第二步:第1相繞組電流關閉,第2相繞組通電,轉子逆時針旋轉一步(15°),旋轉至第2相定子磁極之下停止。
VR變磁阻反應式步進電機的步距角不能直接用上一篇中的θs=180°/PNr公式來計算,而是式θs=180°/PNr計算值的兩倍。即分辨率與永磁式比較,雖然轉子齒數相同,但VR型只有1/2。
第三步:同樣給第3相繞組通電,轉子同樣逆時針旋轉15°,與定子第3相磁極相對位置停止。下一刻,第1相繞組通電,又由步驟3的轉子位置逆時針旋轉15°到第1相定子磁極下,恢復到步驟1狀態。依次進行不斷切換激磁相,1相、2相、3相、1相……轉子逆時針旋轉。此為VR型步進電機的工作原理。
如順時針方向旋轉,換相順序為1相、3相、2相。此時,步距角為轉子齒節距的1/3,即齒節距被相數除得到步距角,輸出轉矩與永磁電機不同,其與激磁電流的平方成正比。
VR型變磁阻反應式步進電機因不使用永久磁鐵,其定轉子磁場強度與激磁電流成正比,要想增大磁場強度,就需要很大的激磁電流,因此,通常有較高溫升。
標簽:
![]()
上一篇:伺服電機編碼器精度與分辨率
下一篇:伺服電機編碼器幾根線以及接...
中國傳動網版權與免責聲明:凡本網注明[來源:中國傳動網]的所有文字、圖片、音視和視頻文件,版權均為中國傳動網(www.hysjfh.com)獨家所有。如需轉載請與0755-82949061聯系。任何媒體、網站或個人轉載使用時須注明來源“中國傳動網”,違反者本網將追究其法律責任。
本網轉載并注明其他來源的稿件,均來自互聯網或業內投稿人士,版權屬于原版權人。轉載請保留稿件來源及作者,禁止擅自篡改,違者自負版權法律責任。
產品新聞
更多>
2025-06-16

2025-06-09

2025-06-06

2025-05-19

2025-04-30

2025-04-11












 網站客服
網站客服 粵公網安備 44030402000946號
粵公網安備 44030402000946號