時間:2017-12-21 10:31:09來源:網絡轉載
1引言
隨著電力電子技術、微電子技術和微處理器的不斷發展,異步電機變頻調速系統的調速性能得到了很大提升,與傳統的直流電機調速系統相比,它具有結構簡單、調速范圍寬、效率高、特性好、運行平穩、安全可靠等特點,在生產實踐中得到了廣泛應用。變頻器加異步電機構成的變頻調速系統大有取代直流調速系統的發展趨勢。
可編程邏輯控制器(PLC)被公認為現代工業自動化的3大支柱之一,其控制系統穩定可靠,通訊組網靈活,可方便集成到現場總線控制系統中,適應當前自動化程度日益提高的要求。PLC變頻調速系統以其優越的性能得到了越來越多的重視,但對于多變量非線性強耦合的異步電動機,采用常規的定參數PID控制方法,對負載變化的適應能力差、抗干擾能力弱且受系統參數變化影響大。因此,在現有硬件設備的基礎上,如何進一步提升變頻調速系統的控制性能,是一個亟待解決的問題。
這里在異步電機變頻調速系統中采用了自抗擾控制器方法,將系統的內擾、外擾等視為系統總擾動,由擴張狀態觀測器統一觀測并加以補償,使控制對象被近似線性化和確定性化,從而實現了系統的非線性控制,并通過實驗驗證了該控制方案的有效性。
2異步電機變頻調速系統數學模型
由電流跟蹤型SPWM逆變器供電的異步電機變頻調速系統在d,q兩相旋轉坐標系下的狀態方程可用五階非線性模型描述,當忽略變頻器時滯時,系統模型可用降階的二階非線性模型描述:
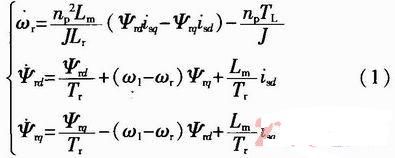
式中:ω1為電氣同步角速度;ωr為轉子速度;isd,isq分別為d,q軸的定子電流;ψrd,ψrq分別為d,g軸的轉子磁鏈;np為極對數;Lm為互感;Lr為轉子電感;J為轉動慣量;Tr為電機轉子時間常數;TL為負載轉矩。
由文獻可知,變頻器在矢量運行模式下系統可逆,且整個系統可以簡化為轉速的單輸入、單輸出系統。
3異步電機變頻調速自抗擾控制系統
3.1一階自抗擾控制器的設計
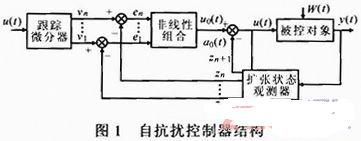
圖1為自抗擾控制器結構圖。該控制器是基于跟蹤微分器(TD)來安排過渡過程、擴張狀態觀測器(ESO)來估計系統狀態、模型和干擾,非線性誤差反饋(NLSEF)來給定控制信號的一種非線性控制器。
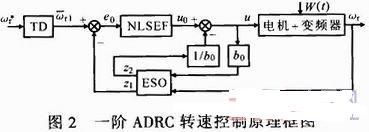
對于矢量控制的異步電機驅動系統,采用一階模型控制器,相應采用二階ESO結構。矢量控制中,一般保持轉子磁鏈恒定,利用ADRC的特點,對于轉動慣量變化引起的系統模型誤差和負載擾動的影響等歸于擴張狀態z2統一觀測并加以補償。基于一階ADRC的轉速控制器原理框圖如圖2所示。
3.2ADRC的優化
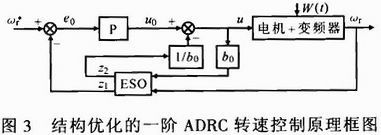
一階ADRC結構中,ESO輸出被控對象和未知擾動的觀測值,沒有被控對象的微分項輸出,控制器無需跟蹤微分器的輸出,因此在ADRC結構中省略跟蹤微分器環節。對于一階對象,采用線性的比例調節代替NLSEF,可在保證控制器性能的前提下,有效地簡化模型,減小計算量,從而得到結構優化的一階ADRC模型。圖3為結構優化的一階ADRC轉速控制框圖。優化后的轉速控制器的完整算法為:
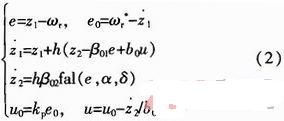
式中:為電機速度給定值;為電機速度反饋ωr的跟蹤信號;為總和擾動W(t)的觀測值;u為控制量;β01,β02為ADRC輸出誤差校正增益;h為采樣周期;kp為比例系數;b0為補償因子,通過整定kp,b0來調整系統的控制性能。
4實驗及結果分析
4.1系統硬件連接
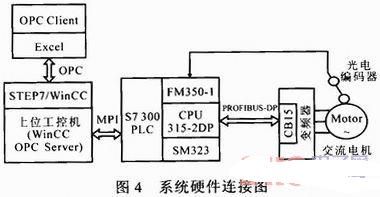
整個系統包括上位機和監控軟件(WinCC)、S7-300PLC,MicroMasterVector(MMV)變頻器、異步電機和光電編碼器,如圖4所示。
4.2系統軟件設計
4.2.1系統通訊設計
系統通訊由三部分組成:①PLC與變頻器之間的PROFIBUS-DP現場總線通訊,實現PLC對變頻器的現場遠程控制;②工控機與PLC之間的MPI通訊,一方面實現了STEP7和PLC之間的通訊,完成程序上載、下載、調試、故障診斷和在線監視等;另一方面實現了WinCC與PLC之間的通訊,完成過程數據的傳輸,系統狀態的實時監控;③WinCC與Excel之間的OPC通訊,通過軟件實現對電機轉速過程數據的歸檔并啟用OPC通訊服務,將過程數據導出到Excel中,用于系統響應曲線的擬合和各項動靜態性能指標的分析。
4.2.2系統控制軟件設計
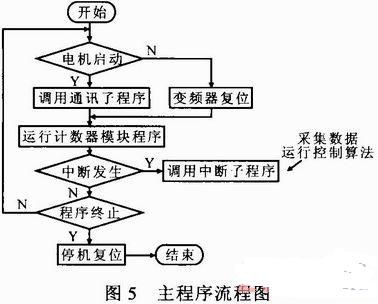
實驗中使用語句表STL在工業軟件STEP7V5.2中編程。整個系統采用結構化編程,系統程序結構如圖5所示。
4.3ADRC的參數整定
研究表明,β01和β02主要由控制器的離散控制周期決定,一般為:β01=1/h,β02=1/(5h2)。試驗中速度的采樣周期取為h=100ms,故取β01=10,β02=20。對于需整定的控制器參數kp,b0,實驗中采用由小到大試湊法進行整定,通過現場調試和修改參數,在得到較好的動靜態效果時確定一組比較理想的控制器參數,參數整定相對容易。
4.4實驗結果對比研究
變頻器設定為矢量控制方式。初始速度給定為200r·min-1,在40s后,速度給定為周期60s,n從200~500r·min-1變化的三角波得到系統的閉環響應。由圖6可知,ADRC控制方式下的跟隨性能明顯優于常規PID控制。
圖7a示出兩種控制下系統響應曲線。由圖可知,ADRC控制下系統的魯棒性和抗干擾性優于PID控制。圖7b示出圖6前40s的局部放大圖。
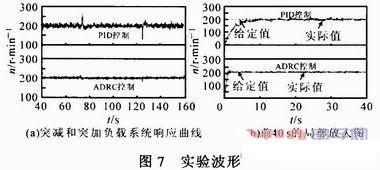
由圖可知,ADRC控制方式下的動靜態性能明顯優于常規PID控制。
5結論
針對PLC變頻調速系統的控制性能需進一步提高的問題,簡要介紹了變頻調速系統的數學模型,設計了一種基于自抗擾控制器的異步電機變頻調速系統。與傳統線性PID控制方法相比,采用自抗擾控制器的變頻調速系統運行性能得到了顯著提升。在保證較快的動態響應的前提下,對ADRC進行了優化,減少了控制器參數,減小了算法計算量,增強了控制器的工程實用性。
標簽:
![]()
上一篇:電機線圈放電的處理方式
下一篇:基于步進電機驅動器的車速表...
中國傳動網版權與免責聲明:凡本網注明[來源:中國傳動網]的所有文字、圖片、音視和視頻文件,版權均為中國傳動網(www.hysjfh.com)獨家所有。如需轉載請與0755-82949061聯系。任何媒體、網站或個人轉載使用時須注明來源“中國傳動網”,違反者本網將追究其法律責任。
本網轉載并注明其他來源的稿件,均來自互聯網或業內投稿人士,版權屬于原版權人。轉載請保留稿件來源及作者,禁止擅自篡改,違者自負版權法律責任。
產品新聞
更多>
2025-06-16

2025-06-09

2025-06-06

2025-05-19

2025-04-30

2025-04-11












 網站客服
網站客服 粵公網安備 44030402000946號
粵公網安備 44030402000946號