 您現(xiàn)在的位置:
中國(guó)傳動(dòng)網(wǎng)
>
技術(shù)頻道
>
應(yīng)用方案
>
基于Intel8253與L298N的電機(jī)PWM調(diào)速方法
您現(xiàn)在的位置:
中國(guó)傳動(dòng)網(wǎng)
>
技術(shù)頻道
>
應(yīng)用方案
>
基于Intel8253與L298N的電機(jī)PWM調(diào)速方法
時(shí)間:2017-12-13 11:06:24來(lái)源:網(wǎng)絡(luò)轉(zhuǎn)載
1、引言
脈沖寬度調(diào)制(PulseWidthModulaTIon—PWM)是指將輸出信號(hào)的基本周期固定,通過(guò)調(diào)整基本周期內(nèi)工作周期的大小來(lái)控制輸出功率。原理就是開(kāi)關(guān)管在一個(gè)周期內(nèi)的導(dǎo)通時(shí)間為t,周期為T(mén),則電機(jī)兩端的平均電壓U=Vcct/T=αVcc。其中,α=t/T(占空比),Vcc是電源電壓。
PWM常取代數(shù)/模轉(zhuǎn)換器(DAC)用于功率輸出控制,其中,直流電機(jī)與交流電機(jī)的速度控制是最常見(jiàn)的應(yīng)用。通常PWM配合橋式驅(qū)動(dòng)電路實(shí)現(xiàn)直流電機(jī)調(diào)速,非常簡(jiǎn)單,且調(diào)速范圍大。
2、Intel8253的內(nèi)部結(jié)構(gòu)及工作模式
2.1、Intel8253的內(nèi)部結(jié)構(gòu)
Intel8253是微型計(jì)算機(jī)外圍接口電路,內(nèi)部包含3個(gè)彼此獨(dú)立的16位減法計(jì)數(shù)器。每個(gè)計(jì)數(shù)器都可由軟件確定為16位二進(jìn)制減法計(jì)數(shù)器或者十進(jìn)制4位BCD減法計(jì)數(shù)器。每個(gè)計(jì)數(shù)器都有6種不同的工作模式,也由軟件確定。每個(gè)計(jì)數(shù)器都有一個(gè)時(shí)鐘輸入端(CLK)、一個(gè)門(mén)控信號(hào)輸入端(GATE)和輸出端(OUT)。讀寫(xiě)由A1、A0、RD、WR和CS等引腳加以控制,主要用以控制Intel8253的數(shù)據(jù)與命令的寫(xiě)入、讀取與禁止。Intel8253的引腳排列如圖1中的U3所示。
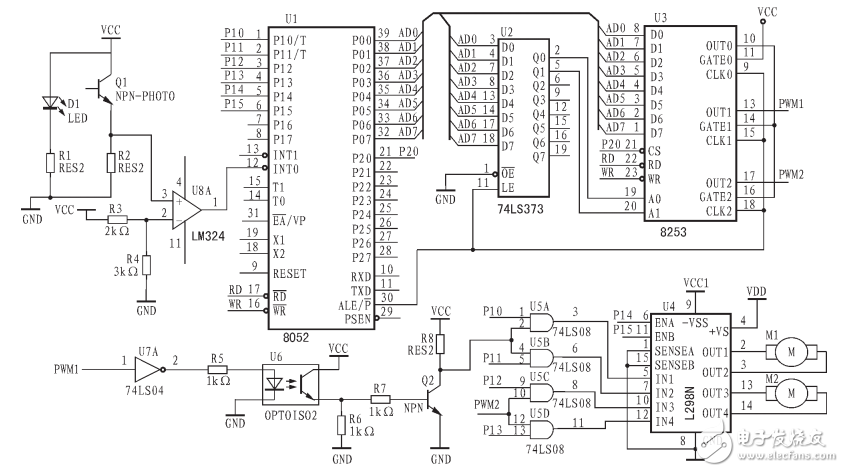
圖1采用Intel8253與L298N的PWM調(diào)速電路
2.2、與PWM有關(guān)的工作模式
與PWM有關(guān)的工作模式是模式1和模式2。
(1)模式1
當(dāng)某計(jì)數(shù)器設(shè)置在模式1以后,微型計(jì)算機(jī)可以通過(guò)二條輸出指令將16位數(shù)據(jù)M送入該計(jì)數(shù)器。這時(shí)該計(jì)數(shù)器的輸出端并無(wú)任何響應(yīng)。一旦該計(jì)數(shù)器的門(mén)控輸入端脈沖上升沿到時(shí),它的輸出端立刻輸出一個(gè)寬度為Mτ的負(fù)向脈沖,如圖2所示。
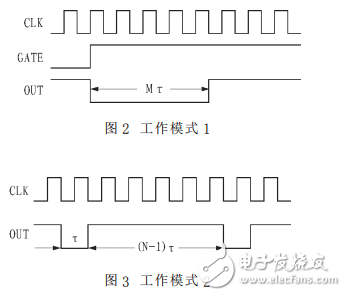
(2)模式2
當(dāng)某計(jì)數(shù)器設(shè)置在模式2以后,微型計(jì)算機(jī)可以通過(guò)二條輸出指令將16位數(shù)據(jù)N送入該計(jì)數(shù)器。輸出指令結(jié)束后,該計(jì)數(shù)器立即輸出周期為Nτ的連續(xù)方波,如圖3所示。
如果將8253的計(jì)數(shù)器0和計(jì)數(shù)器1分別設(shè)置在模式2和模式1,并按圖4所示連接,就可以得到一個(gè)十分簡(jiǎn)單的脈寬調(diào)制發(fā)生器。工作開(kāi)始前,先將常數(shù)N送入計(jì)數(shù)器0,再將常數(shù)M送入計(jì)數(shù)器1中(M《N),于是計(jì)數(shù)器0將輸出周期為Nτ的連續(xù)方波。計(jì)數(shù)器1的門(mén)控輸入端每隔Nτ時(shí)間接到一次正跳變信號(hào)。因此,每隔Nτ時(shí)間計(jì)數(shù)器1將輸出一個(gè)寬度為Mτ的負(fù)向脈沖。因此,通過(guò)改變M與N可以得到一個(gè)占空比可調(diào)的PWM波。
2.3、PWM程序
Intel8253的讀寫(xiě)控制邏輯由A1、A0、RD、WR和CS等引腳加以控制,其中,端口選擇信號(hào)A1、A0決定3個(gè)計(jì)數(shù)器、控制寄存器中哪一個(gè)進(jìn)行工作,A1,A0:00-10CPU選擇#0-#2計(jì)數(shù)器進(jìn)行讀/寫(xiě),11CPU將控制字寫(xiě)入Intel8253。
Intel8253的控制寄存器如下:

M2,M1,M0:000-101選擇工作模式0-5SC1,SC0:00-10選擇計(jì)數(shù)器#0-#2,11回讀命令BCD:0對(duì)應(yīng)二進(jìn)制計(jì)數(shù),1對(duì)應(yīng)BCD計(jì)數(shù)RW1,RW0:00鎖住計(jì)數(shù)器穩(wěn)定讀數(shù),01只讀/寫(xiě)低8位字節(jié),10只讀/寫(xiě)高8位字節(jié),11先讀/寫(xiě)低8位字節(jié),后讀/寫(xiě)高8位字節(jié)。
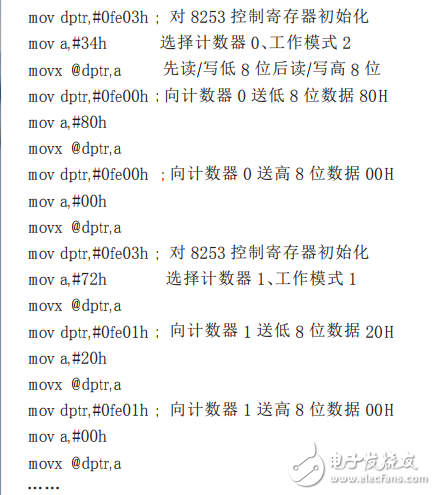
根據(jù)以上程序,可以得到占空比為α=t/T=0020H/0080H=25%同理,將Intel8253的計(jì)數(shù)器0和計(jì)數(shù)器2分別設(shè)置在模式2和模式1,并按圖4的連接方法也可以得到另一個(gè)PWM2。
3、L298N型驅(qū)動(dòng)器的原理及應(yīng)用
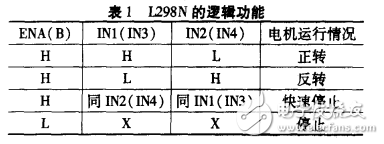
L298N是SGS公司的產(chǎn)品,內(nèi)部包含4通道邏輯驅(qū)動(dòng)電路,是一種二相和四相電機(jī)的專(zhuān)用驅(qū)動(dòng)器,即內(nèi)含二個(gè)H橋的高電壓大電流雙全橋式驅(qū)動(dòng)器,接收標(biāo)準(zhǔn)TTL邏輯電平信號(hào),可驅(qū)動(dòng)46V、2A以下的電機(jī)。其引腳排列如圖1中U4所示,1腳和15腳可單獨(dú)引出連接電流采樣電阻器,形成電流傳感信號(hào)。L298可驅(qū)動(dòng)2個(gè)電機(jī),OUT1、OUT2和OUT3、OUT4之間分別接2個(gè)電動(dòng)機(jī)。5、7、10、12腳接輸入控制電平,控制電機(jī)的正反轉(zhuǎn),ENA,ENB接控制使能端,控制電機(jī)的停轉(zhuǎn)。L298的邏輯功能如表1所列。
如圖1所示,Intel8253輸出二組PWM波,每一組PWM波用來(lái)控制一個(gè)電機(jī)的速度,另外二個(gè)I/O口可以控制電機(jī)的正反轉(zhuǎn),控制方法與控制電路都比較簡(jiǎn)單。即P10、P11控制第一個(gè)電機(jī)的方向,輸入的PWM1控制第一個(gè)電機(jī)的速度;P12、P13控制第二個(gè)電機(jī)的方向,輸入的PWM2控制第二個(gè)電機(jī)的速度。
由于電機(jī)在正常工作時(shí)對(duì)電源的干擾很大,只用一組電源時(shí)會(huì)影響單片機(jī)的正常工作,所以選用雙電源供電。一組5V電源給單片機(jī)和控制電路供電,另外一組5V、9V電源給L298N的+VSS、+VS供電。在控制部分和電機(jī)驅(qū)動(dòng)部分之間用光耦隔開(kāi),以免影響控制部分電源的品質(zhì)。
圖1就是一個(gè)實(shí)現(xiàn)智能小汽車(chē)的應(yīng)用電路。D1、Q1是一對(duì)紅外發(fā)射接收對(duì)管,與LM324構(gòu)成光電傳感檢測(cè)電路。通過(guò)Intel8253和L298N可實(shí)現(xiàn)汽車(chē)的加速、減速、剎停,并可通過(guò)兩個(gè)電機(jī)的不同轉(zhuǎn)速實(shí)現(xiàn)左轉(zhuǎn)和右轉(zhuǎn)等功能。
標(biāo)簽:
![]()
中國(guó)傳動(dòng)網(wǎng)版權(quán)與免責(zé)聲明:凡本網(wǎng)注明[來(lái)源:中國(guó)傳動(dòng)網(wǎng)]的所有文字、圖片、音視和視頻文件,版權(quán)均為中國(guó)傳動(dòng)網(wǎng)(www.hysjfh.com)獨(dú)家所有。如需轉(zhuǎn)載請(qǐng)與0755-82949061聯(lián)系。任何媒體、網(wǎng)站或個(gè)人轉(zhuǎn)載使用時(shí)須注明來(lái)源“中國(guó)傳動(dòng)網(wǎng)”,違反者本網(wǎng)將追究其法律責(zé)任。
本網(wǎng)轉(zhuǎn)載并注明其他來(lái)源的稿件,均來(lái)自互聯(lián)網(wǎng)或業(yè)內(nèi)投稿人士,版權(quán)屬于原版權(quán)人。轉(zhuǎn)載請(qǐng)保留稿件來(lái)源及作者,禁止擅自篡改,違者自負(fù)版權(quán)法律責(zé)任。
產(chǎn)品新聞
更多>

2025-06-09

從外觀到內(nèi)核的「超進(jìn)化」!NK550M五軸...
2025-06-06

2025-05-19

2025-04-30

性能躍升20%!維宏NK300CX Plus數(shù)控系統(tǒng)...
2025-04-11
推薦專(zhuān)題
更多>網(wǎng)站簡(jiǎn)介|會(huì)員服務(wù)|聯(lián)系方式|幫助信息|版權(quán)信息|網(wǎng)站地圖|友情鏈接|法律支持|意見(jiàn)反饋|sitemap
傳動(dòng)網(wǎng)-工業(yè)自動(dòng)化與智能制造的全媒體“互聯(lián)網(wǎng)+”創(chuàng)新服務(wù)平臺(tái)
 網(wǎng)站客服服務(wù)咨詢采購(gòu)咨詢媒體合作
網(wǎng)站客服服務(wù)咨詢采購(gòu)咨詢媒體合作
Chuandong.com Copyright ?2005 - 2025 ,All Rights Reserved 深圳市奧美大唐廣告有限公司 版權(quán)所有 粵ICP備 14004826號(hào) | 營(yíng)業(yè)執(zhí)照證書(shū) | 不良信息舉報(bào)中心 |  粵公網(wǎng)安備 44030402000946號(hào)
粵公網(wǎng)安備 44030402000946號(hào)










