時間:2017-12-13 10:26:03來源:網(wǎng)絡(luò)轉(zhuǎn)載
在工業(yè)系統(tǒng)中選擇器件需要考慮多個因素,其中包括:性能、工程變更的成本、上市時間、人員的技能、重用現(xiàn)有IP/程序庫的可能性、現(xiàn)場升級的成本,以及低功耗和低成本。
工業(yè)市場的近期發(fā)展推動了對具有高集成度、高性能、低功耗FPGA器件的需求。設(shè)計人員更喜歡網(wǎng)絡(luò)通信而不是點對點通信,這意味著可能需要額外的控制器用于通信,進(jìn)而間接增加了BOM成本、電路板尺寸和相關(guān)NRE(一次性工程費(fèi)用)成本。
總體擁有成本用于分析和估計購置的壽命周期成本,它是所有與設(shè)計相關(guān)的直接和間接成本的擴(kuò)展集,包括工程技術(shù)成本、安裝和維護(hù)成本、材料清單(BOM)成本和NRE(研發(fā))成本等。通過考慮系統(tǒng)級因素有可能最大限度地減少總體擁有成本,從而帶來可持續(xù)的長期盈利能力。
美高森美公司(Microsemi)提供具有硬核ARMCortex-M3微控制器和IP集成的SmartFusion2SoCFPGA器件,它采用成本優(yōu)化的封裝,具有減少BOM和電路板尺寸的特性。這些器件具有低功耗和寬溫度范圍,能夠在沒有冷卻風(fēng)扇的極端條件下可靠地運(yùn)行。SmartFusion2SoCFPGA架構(gòu)將一個硬核ARMCortex-M3IP與FPGA架構(gòu)相集成,可以實現(xiàn)更大的設(shè)計靈活性和更快的上市時間。美高森美為電機(jī)控制算法開發(fā)提供了具有多個多軸電機(jī)控制參考設(shè)計和IP的生態(tài)系統(tǒng),使由多處理器解決方案轉(zhuǎn)向單一器件解決方案(即SoCFPGA)更加容易。
影響TCO的因素
以下是影響系統(tǒng)TCO的一些因素。
(1)長壽命周期。FPGA可以在現(xiàn)場部署之后進(jìn)行重新編程,這延長了產(chǎn)品的壽命周期,從而使設(shè)計人員能夠?qū)W⒂谛庐a(chǎn)品開發(fā),實現(xiàn)更快的上市時間。
(2)BOM。美高森美基于閃存技術(shù)的FPGA在上電時無需啟動PROM或閃存MCU來加載FPGA,它們是零級非易失性/即時啟動器件。與基于SRAM的FPGA器件不同,美高森美基于閃存的FPGA無需附加上電監(jiān)控器,這是因為閃存開關(guān)不會隨電壓而改變。
(3)上市時間。OEM廠商之間的激烈競爭迫切需要更多的產(chǎn)品差異化和更快的上市時間。經(jīng)過驗證的IP模塊可大幅縮短設(shè)計時間。目前已經(jīng)可以提供多個構(gòu)建工業(yè)解決方案所需的IP模塊,同時更多的模塊正在開發(fā)中。SoC表現(xiàn)出的另一個獨(dú)特優(yōu)勢是可以用于調(diào)試FPGA設(shè)計。為了調(diào)試FPGA設(shè)計,可以通過用于調(diào)試的高速接口,利用微控制器子系統(tǒng)從FPGA中提取信息。
(4)工程工具成本。與FPGA開發(fā)工具昂貴的概念相反,美高森美提供用于FPGA開發(fā)的免費(fèi)LiberoSoCIDE,僅在開發(fā)高端器件時才需要付費(fèi)。
工業(yè)驅(qū)動系統(tǒng)
工業(yè)驅(qū)動系統(tǒng)由一個電機(jī)控制器件和一個通信器件構(gòu)成,電機(jī)控制器件包含了驅(qū)動逆變器的邏輯和保護(hù)邏輯,通信器件則使監(jiān)控控制能夠?qū)\(yùn)行時間參數(shù)進(jìn)行初始化和修改。
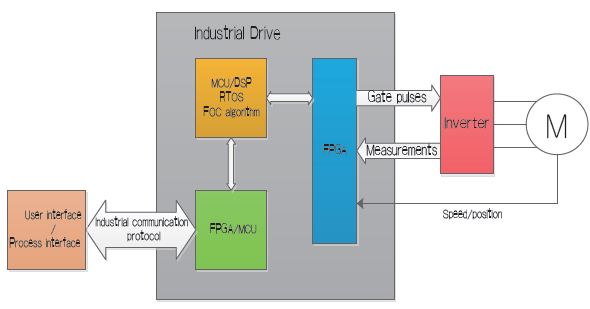
圖1:典型工業(yè)驅(qū)動系統(tǒng)。
在典型的驅(qū)動系統(tǒng)(圖1)中,可能使用多個控制器器件來實現(xiàn)驅(qū)動邏輯。一個器件可能執(zhí)行與電機(jī)控制算法相關(guān)的計算,第二個器件可能運(yùn)行與通信相關(guān)的任務(wù),第三個器件則可能運(yùn)行與安全性相關(guān)的任務(wù)。
多軸電機(jī)控制
傳統(tǒng)上,工業(yè)電機(jī)控制應(yīng)用使用微控制器或DSP來運(yùn)行電機(jī)控制所需的復(fù)雜算法,在大多數(shù)傳統(tǒng)的工業(yè)驅(qū)動中,F(xiàn)PGA與微控制器或DSP一起使用,用于數(shù)據(jù)采集和快速作用保護(hù)。除了數(shù)據(jù)采集、PWM生成和保護(hù)邏輯,F(xiàn)PGA傳統(tǒng)上并未在實現(xiàn)電機(jī)控制算法方面發(fā)揮主要作用。
使用微控制器或DSP實現(xiàn)電機(jī)控制算法的方法并不容易擴(kuò)展到多個以獨(dú)立速度運(yùn)行的電機(jī)(多軸電機(jī)控制),美高森美SmartFusion2SoCFPGA可以使用單一器件來實現(xiàn)集成且完整的多軸電機(jī)驅(qū)動控制(圖2)。
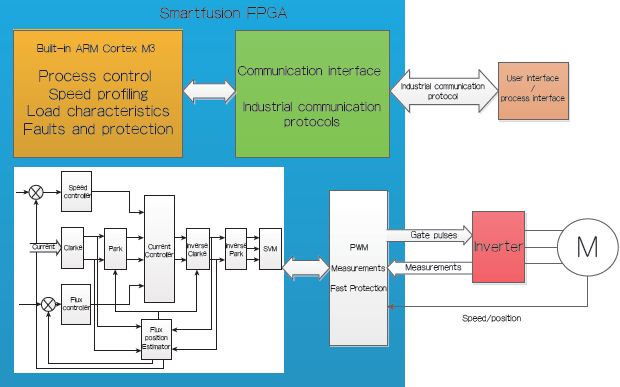
圖2:美高森美SmartFusion2SoCFPGA使用單一器件來實現(xiàn)完整的多軸電機(jī)驅(qū)動控制。
控制方面可以分為兩個部分。一個部分用于運(yùn)行磁場定向控制(FOC)算法、速度控制、電流控制、速度估計、位置估計和PWM生成;另一個部分則包括速度曲線、負(fù)載特性、過程控制和保護(hù)(故障和報警)。執(zhí)行FOC算法屬于時間關(guān)鍵型,需要在極高的采樣速率下進(jìn)行(在微秒范圍),特別是針對具有低定子電感的高速電機(jī)。這使得在FPGA中實現(xiàn)FOC算法變得更優(yōu)越。過程控制、速度曲線和其他保護(hù)無需快速更新,因而能夠以較低的采樣速率執(zhí)行(在毫秒范圍),并且能夠在內(nèi)置Cortex-M3子系統(tǒng)中進(jìn)行編程。
晶體管開關(guān)周期在驅(qū)動中發(fā)揮著重要的作用,如果FOC回路執(zhí)行時間比開關(guān)周期短得多,硬件模塊可以重用于計算第二個電機(jī)的電壓。這意味著器件可以在相同的成本下提供更高的性能。
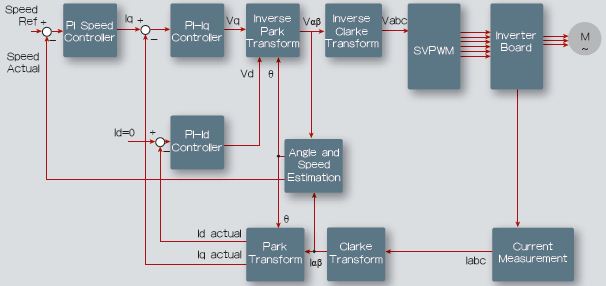
圖3:永磁同步電機(jī)的磁場定向控制(FOC)框圖
(1)電機(jī)控制IP模塊。圖3為無傳感器磁場定向控制算法,這一部分將會討論這些模塊,它們作為IP核提供。
●PI控制器。比例積分(PI)控制器是用于控制系統(tǒng)參數(shù)的反饋機(jī)制,它具有兩個用于控制控制器動態(tài)響應(yīng)的可調(diào)增益參數(shù)—比例和積分增益常數(shù)。PI控制器的比例分量是比例增益常數(shù)和誤差輸入的乘積,而積分分量是累積誤差和積分增益常數(shù)的乘積。這兩個分量被加在了一起。PI控制器的積分階段可能在系統(tǒng)中引起不穩(wěn)定,因為數(shù)據(jù)值不受控制地增加。這種不受控制的數(shù)據(jù)上升稱作積分飽卷,所有的PI控制器實現(xiàn)方案都包括一個抗飽卷機(jī)制,用于確保控制器輸出是有限的。美高森美的PI控制器IP模塊使用hold-on-saturation(保持飽和)算法用于抗飽卷。這個模塊還提供附加特性以設(shè)置最初的輸出值。
●磁場定向控制(FOC)。FOC是通過獨(dú)立地確定和控制轉(zhuǎn)矩和磁化電流分量來為電機(jī)提供最優(yōu)電流的算法。在永磁同步電機(jī)(PMSM)中,轉(zhuǎn)子已經(jīng)磁化。因此,為電機(jī)提供的電流只用于轉(zhuǎn)矩。FOC是計算密集型算法,但是美高森美電機(jī)控制參考設(shè)計已經(jīng)針對器件資源的最優(yōu)使用而構(gòu)建。FOC算法包括Clarke、Park、逆Clarke和逆Park變換。
●角度估計。FOC的一個輸入是轉(zhuǎn)子角度。精確確定轉(zhuǎn)子角度對于確保低功耗是必不可少的。增添確定位置和速度的物理傳感器會增加系統(tǒng)的成本并降低可靠性。無傳感器算法有助于消除傳感器,但是增加了計算復(fù)雜性。美高森美針對無傳感器控制提供了兩個角度計算算法IP模塊—一個基于Luenberger觀測器,另一個基于直接反電動勢計算。該公司還提供基于霍爾傳感器和編碼器的單獨(dú)參考設(shè)計。
●PLL。PLL用于同步信號,在多個應(yīng)用中有用,例如逆變器的角度估計和電網(wǎng)同步。
●速率限制器。速率限制器模塊可以實現(xiàn)系統(tǒng)變量或輸入的平滑改變。例如,在電機(jī)控制系統(tǒng)中,如果電機(jī)所需的速度突然改變,系統(tǒng)可能變得不穩(wěn)定。為了避免此類情形,速率限制器模塊用于從初始速度轉(zhuǎn)變到所需的速度。速率限制器模塊可以進(jìn)行配置以控制改變的速率。
●空間矢量調(diào)制。空間矢量調(diào)制模塊改善了直流總線利用率,并消除了晶體管開關(guān)的短脈沖。因為晶體管開啟/關(guān)斷時間比脈沖持續(xù)時間長,短脈沖會導(dǎo)致不正確的開關(guān)行為。
●三相PWM生成。在所有計算的最后,可以得到三相電機(jī)電壓。這些電壓用于生成逆變器中晶體管的開關(guān)信號。PWM模塊為六個(三個高側(cè)和三個低側(cè))晶體管產(chǎn)生開關(guān)信號,并且具有死區(qū)時間和延遲時間插入等先進(jìn)特性。可編程的死區(qū)時間插入特性有助于避免逆變器引腳上的災(zāi)難性短路情況。可編程的延遲時間插入特性使ADC測量與PWM信號生成能夠同步。該模塊可以配置成與僅由N-MOSFET組成的逆變器或同時包括N-MOSFET和P-MOSFET的逆變器一起工作。
(2)在SoC中調(diào)試FPGA設(shè)計。通常,在微控制器上調(diào)試設(shè)計比在FPGA上進(jìn)行調(diào)試相對簡單一些。在SoC中,可以利用FPGA的高性能,同時保持在微控制器中更快速調(diào)試的優(yōu)勢。美高森美SmartFusion2SoCFPGA中的微控制器子系統(tǒng)和FPGA架構(gòu)可以通過AMBAAPB或AXI總線彼此進(jìn)行通信。這樣可以把測試數(shù)據(jù)注入FPGA架構(gòu)中,或者從FPGA架構(gòu)中記錄調(diào)試數(shù)據(jù),從而幫助實現(xiàn)運(yùn)行時間的內(nèi)部數(shù)據(jù)可視化,用于實時調(diào)試。固件代碼可以單步運(yùn)行,在代碼中可以設(shè)置斷點來分析FPGA寄存器數(shù)據(jù)。
基于SmartFusion2SoCFPGA的多軸電機(jī)控制解決方案通過USB連接至主機(jī)PC,并與圖形用戶界面(GUI)通信,進(jìn)行啟動/停止電機(jī),設(shè)置電機(jī)速度值和其他系統(tǒng)參數(shù),描繪多達(dá)四個系統(tǒng)變量,例如電機(jī)速度、電機(jī)電流和轉(zhuǎn)子角度(圖4)。
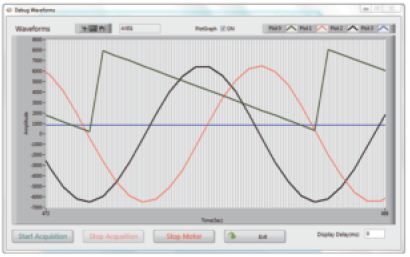
圖4:GUI的屏幕截圖—繪制內(nèi)部參數(shù):轉(zhuǎn)子角度(綠色)、Valpha(紅色)、Vbeta(黑色)、電機(jī)速度(藍(lán)色)。
(3)生態(tài)系統(tǒng)。美高森美提供一組豐富的IP庫,包括前面討論過的數(shù)種電機(jī)控制功能。這些模塊可以輕易定制,并可以在美高森美器件中移植。使用LiberoSoC軟件的SmartDesign工具,這些模塊可以采用圖形方式配置和連接在一起。借助于這些IP模塊,設(shè)計人員能夠顯著減少在FPGA中實現(xiàn)電機(jī)控制算法所需的時間。
這些IP模塊已在以高達(dá)30,000r/min轉(zhuǎn)速和200kHz開關(guān)頻率運(yùn)行的電機(jī)上進(jìn)行了測試。
工業(yè)通信協(xié)議
工業(yè)網(wǎng)絡(luò)的發(fā)展趨勢是通過使用更快的網(wǎng)絡(luò)通信替代點至點通信。實現(xiàn)此類高速通信需要支持更高的帶寬,這對于同時處理電機(jī)控制算法的微控制器或DSP來說并不容易。在大多數(shù)情況下,會使用一個附加的微控制器或FPGA來處理與每個電機(jī)控制器的通信。通常使用的基于以太網(wǎng)的協(xié)議有PROFINET、EtherNet/IP和EtherCAT標(biāo)準(zhǔn),這些標(biāo)準(zhǔn)仍然在演進(jìn)。其他的協(xié)議包括了CAN和Modbus。在這種情況下使用SoC的優(yōu)勢,是在單一FPGA平臺上支持多種工業(yè)以太網(wǎng)協(xié)議標(biāo)準(zhǔn)。
根據(jù)終端系統(tǒng)目標(biāo),可以通過重用IP和協(xié)議棧(用于通信)來優(yōu)化系統(tǒng)的成本,或者通過仔細(xì)地在硬件(FPGA)和軟件(ARMCortex-M3子系統(tǒng))中劃分功能來優(yōu)化性能。
美高森美的SmartFusion2FPGA具有內(nèi)置CAN、高速USB和千兆以太網(wǎng)模塊作為微控制器子系統(tǒng)的一部分。高速SERDES模塊用于實現(xiàn)涉及串行數(shù)據(jù)傳送的協(xié)議。
安全性
SmartFusion2SoCFPGA器件具有數(shù)項設(shè)計和數(shù)據(jù)安全特性。DPA認(rèn)證反篡改保護(hù)和加密特性等設(shè)計安全特性能夠幫助保護(hù)客戶的知識產(chǎn)權(quán)。SoCFPGA器件還包括數(shù)據(jù)安全特性,例如ECC硬件加速器、AES-128/256和SHA-256服務(wù)。對于數(shù)據(jù)安全性,可以使用EnforcITIPSuite和CodeSEAL軟件安全構(gòu)件,EnforcITIP包括一套可定制內(nèi)核(作為網(wǎng)表),有效地將安全層移到硬件中。CodeSEAL將對策注入到固件中,可以獨(dú)立地使用,或者用作EnforcIT的提升。
實現(xiàn)協(xié)議的靈活性可讓設(shè)計人員使用多個安全層來認(rèn)證從中央監(jiān)控控制器進(jìn)入的信息。
可靠性
在多個市場中安全標(biāo)準(zhǔn)的增長推動了高可靠性的需求,SmartFusion2經(jīng)設(shè)計滿足高可用性、安全關(guān)鍵型和任務(wù)關(guān)鍵型系統(tǒng)的需求,以下是SmartFusion2SoCFPGA提供的某些可靠性特性。
(1)單粒子翻轉(zhuǎn)(SEU)免疫零FIT率配置。高可靠性運(yùn)作需要SEU免疫零FIT率FPGA配置,SmartFusion2架構(gòu)具有不受α或中子輻射的免疫能力,因為它使用閃存來配置路由矩陣和邏輯模塊中使用的晶體管。基于SRAM的FPGA在海平面上的FIT(時間失效)率可能為1k~4k,在高于海平面5,000英尺的位置會高得多。高可靠性應(yīng)用可接受的FIT率低于20,這使得SmartFusion2最適合這些應(yīng)用。
(2)EDAC保護(hù)。SmartFusion2器件具有錯誤檢測與校正(EDAC)控制器,可防止在微控制器子系統(tǒng)(MSS)存儲器中發(fā)生的單粒子翻轉(zhuǎn)錯誤。
(3)無外部配置器件。在具有大量FPGA的復(fù)雜系統(tǒng)中,使用外部配置器件會降低可靠性。在上電時,F(xiàn)PGA需花費(fèi)時間來進(jìn)行配置,這在使用多個FPGA器件的應(yīng)用中帶來了設(shè)計復(fù)雜性。SmartFusion2SoCFPGA在器件內(nèi)部包含了配置存儲器,它提供了在器件一上電時就開啟的附加優(yōu)勢。
(4)軍用溫度級器件。SmartFusion2SoCFPGA器件針對軍用溫度條件進(jìn)行了全面測試。軍用級器件具有10k和150k邏輯單元,并具有允許訪問密碼加速器的安全特性和數(shù)據(jù)安全特性。
總結(jié)
美高森美SmartFusion2SoCFPGA使用經(jīng)過高度優(yōu)化的電機(jī)控制IP模塊和經(jīng)過驗證的參考設(shè)計,提供了數(shù)種降低工業(yè)設(shè)計TCO的特性。從微控制器遷移的客戶將能夠重用某些舊代碼,而FPGA設(shè)計人員將能夠利用FPGA架構(gòu)和ARMCortex-M3子系統(tǒng)來創(chuàng)建一個高效的架構(gòu),允許電機(jī)控制模塊和通信模塊同時駐留在單一器件中。ARMCortex-M3微控制器子系統(tǒng)的存在,可以實現(xiàn)靈活的設(shè)計和智能分區(qū),而針對性能和成本做優(yōu)化。微控制器子系統(tǒng)還可以在運(yùn)行時間中注入和記錄數(shù)據(jù),加速調(diào)試FPGA設(shè)計。SmartFusion2平臺還提供了實現(xiàn)工業(yè)通信協(xié)議的廣泛選項。它同時提供用于設(shè)計和數(shù)據(jù)安全的多項安全特性,還提供了滿足高可靠性需求的特性。SmartFusion2系列器件備有強(qiáng)大的生態(tài)系統(tǒng)支持,能夠幫助客戶以最低TCO來開發(fā)工業(yè)解決方案。
標(biāo)簽:
![]()
中國傳動網(wǎng)版權(quán)與免責(zé)聲明:凡本網(wǎng)注明[來源:中國傳動網(wǎng)]的所有文字、圖片、音視和視頻文件,版權(quán)均為中國傳動網(wǎng)(www.hysjfh.com)獨(dú)家所有。如需轉(zhuǎn)載請與0755-82949061聯(lián)系。任何媒體、網(wǎng)站或個人轉(zhuǎn)載使用時須注明來源“中國傳動網(wǎng)”,違反者本網(wǎng)將追究其法律責(zé)任。
本網(wǎng)轉(zhuǎn)載并注明其他來源的稿件,均來自互聯(lián)網(wǎng)或業(yè)內(nèi)投稿人士,版權(quán)屬于原版權(quán)人。轉(zhuǎn)載請保留稿件來源及作者,禁止擅自篡改,違者自負(fù)版權(quán)法律責(zé)任。
產(chǎn)品新聞
更多>
顛覆傳統(tǒng)加工!維宏VHTube一鍵實現(xiàn)變徑...
2025-06-16

2025-06-09

從外觀到內(nèi)核的「超進(jìn)化」!NK550M五軸...
2025-06-06

2025-05-19

2025-04-30

性能躍升20%!維宏NK300CX Plus數(shù)控系統(tǒng)...
2025-04-11
網(wǎng)站簡介|會員服務(wù)|聯(lián)系方式|幫助信息|版權(quán)信息|網(wǎng)站地圖|友情鏈接|法律支持|意見反饋|sitemap
傳動網(wǎng)-工業(yè)自動化與智能制造的全媒體“互聯(lián)網(wǎng)+”創(chuàng)新服務(wù)平臺
Chuandong.com Copyright ?2005 - 2025 ,All Rights Reserved 深圳市奧美大唐廣告有限公司 版權(quán)所有 粵ICP備 14004826號 | 營業(yè)執(zhí)照證書 | 不良信息舉報中心 |  粵公網(wǎng)安備 44030402000946號
粵公網(wǎng)安備 44030402000946號












 網(wǎng)站客服
網(wǎng)站客服